唐 瑞,岳显昌,张 兰,王市委
(武汉大学电子信息学院,湖北武汉430072)
摘 要:高频地波雷达的工作很受外界环境和噪声的干扰,严重影响了雷达的信号质量。为了监测外界噪声的频谱,让雷达工作在信噪比较高的工作频段上,针对目前武汉大学海态实验室所研制的双频多通道高频地波雷达系统,设计了一种频谱监测仪,该频谱监测仪从高频地波雷达的工作波形设计与探测原理出发,采用外差式与快速傅里叶变换算法相结合的频谱监测设计方案 ,具有传统模拟式和数字式的频谱仪的优点,并通过设计及验证,完成了整个系统的设计,闭环实验结果表明能够有效检测到外部噪声,能够适用于新一代雷达系统,为后续雷达数据的采集和处理有更好的改善。
关键词:高频地波雷达;频谱检测;外差式结构;快速傅里叶变换
海洋雷达环境监测技术是一个由无线电科学、信息技术和物理海洋学交叉形成的新的学科方向。基于对电磁波与海洋粗糙面相互作用机理的认识,20世纪60—70年代以来海洋雷达技术得以迅速发展起来,用于海洋监测的雷达按频段主要分为高频海洋雷达和微波海洋雷达两大类[1-2]。前者有高频地波雷达、高频天波雷达和天地波一体化雷达,主要用于实时监测海洋表面风、浪、流、潮等海面动力学参数,以及实现对海上的低速目标的监测。与现有的其他海洋遥感设备相比,高频地波雷达具有覆盖面积大、探测精度高、造价适度、运行费用低、可以全天候工作等优点,并能够探测到视距以外的海域,被认为是最理想的海洋环境检测设备之一。
由于其雷达的工作频段在3~30 MHz,除了环境噪声和外部干扰外,夜间的短波电台对雷达的工作频率会带来严重的噪声干扰,影响雷达的探测性能。为选择最佳的雷达工作频率,对噪声和干扰频谱进行分析是一项十分重要的工作[3]。频谱监测的目的就是为了得到雷达的工作频段内噪声的频谱[4],通过频谱监测去获得外界噪声的频带,为雷达实时选取信噪比最高的工作频段。目前的无线电频谱监测设备监测的频谱范围太广,远超地波雷达的工作范围,导致资源的浪费;并且它也不能很好地适应地波雷达收发共站的模式,雷达高功率的发射信号极有可能损坏频谱监测设备。武汉大学海态实验室研制的天地波混合组网海态高频地波雷达系统采用天波发射、地波接收和地波发射、地波接收两种模式实现对海洋表面动力学参数,如海洋表面流场、风场等的监测[5]。在该系统中,高频地波雷达工作在双频模式,跨越两个频段,相对于单频模式更易受到外界噪声和干扰影响,因此对于外界环境频谱的监测就显得尤为重要。针对高频地波雷达双频工作模式,设计了频谱监测仪,作为雷达工作时外部频谱监测的辅助设备,并为雷达选聘提供依据。
高频地波雷达的频谱监测模块一般采用窄带中频数字化的结构,一次变频、高中频采样的方式[6],文献[7]用机器学习进行了高频雷达频谱的预测,文中从高频地波雷达的工作波形设计与探测原理出发,结合天地波一体化雷达系统探测[8-9]的需要采用扫频外差式结构和快速傅里叶分析法相结合的零中频采集方案,设计了高频地波雷达的频谱监测仪,系统接收雷达工作环境周围的电磁信号,获取环境噪声与干扰信号的频谱图,为雷达工作选取信噪比高的工作频段,使其不仅可以接收高频地波雷达工作环境中的短波段干扰和噪声,也能为后期的数据收集提供噪声数据,而且还可以为雷达选择合适的工作频率作参考,从而提高雷达的整体性能。
雷达工作模式是收发共站,雷达工作波形采用线性调频中断连续波(FMICW),雷达系统产生线性调频连续波(FMCW)本振信号
式中:f0为载频;K=B/T为扫频斜率,B为雷达工作带宽,T为扫频周期,本系统设置的雷达工作带宽为30 k Hz,扫频周期为125 ms。本振信号S(t)经过门控脉冲后调制为发射信号ST(t),脉冲调制过程如图1所示。
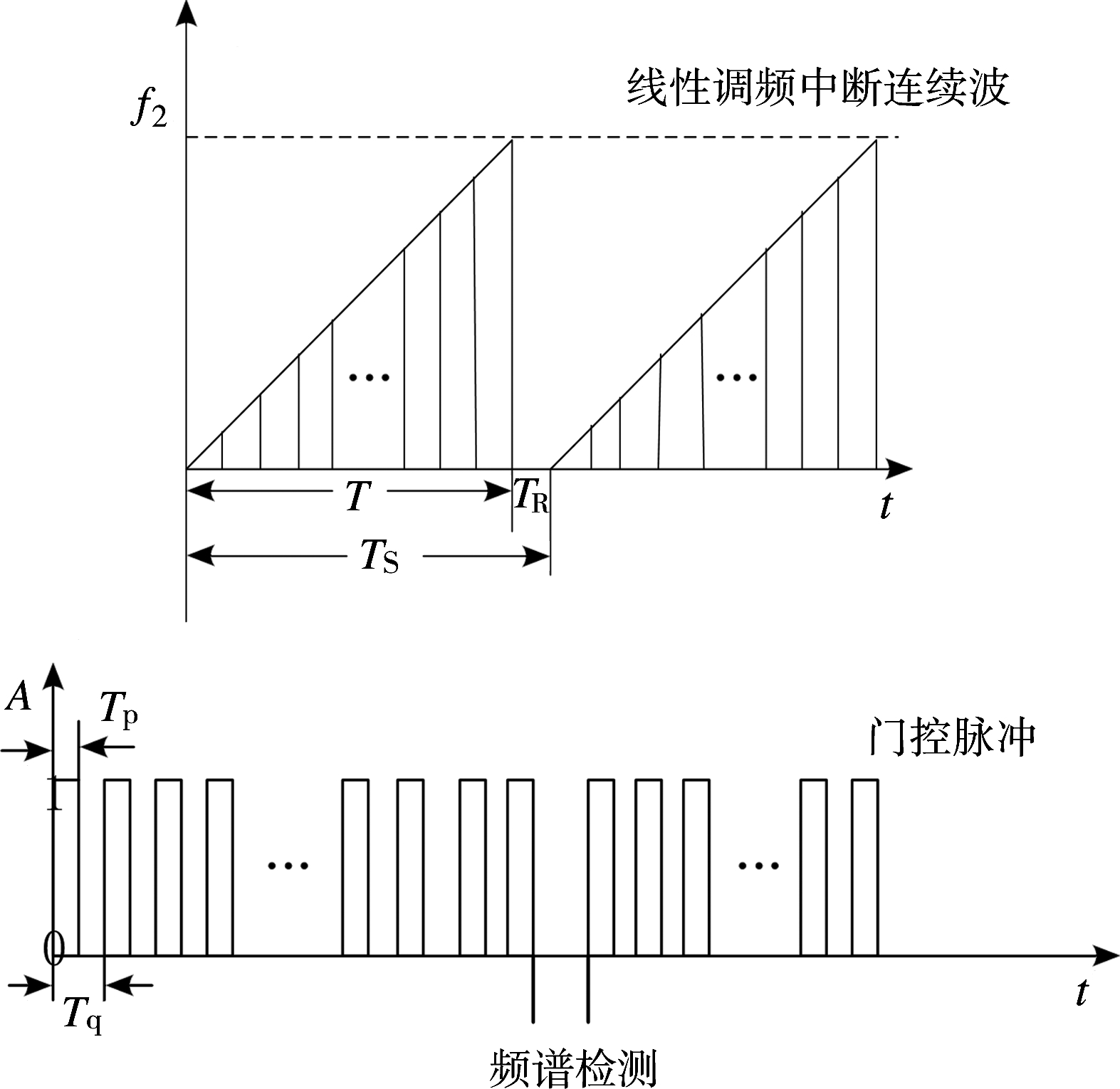
图1 脉冲调制过程
上图中TS为雷达工作周期,T为扫频周期,TR为间隙期监测的时间,在TR期间雷达处于发射的间歇期,发射机不工作,利用这段时间来进行频谱监测,对环境噪声和干扰信号进行采集。
文中所设计高频地波雷达的频谱监测仪主要是基于外差式和FFT的原理,其设计思路如图2所示。

图2 基于外差式和FFT的频谱仪
在频谱监测期间,本振输出为单频信号fL0,由本振信号和射频信号fR以及低通滤波器的截止频率fL确定外部噪声信号的频谱,频率范围为fL0~fL0-fR。当采集完1 024个点数,即完成一次采样,此时,本振源的输出为fL0+1 k Hz,此时得到的外部噪声的频率监测范围为fL0+1 k Hz~fL0+1 k Hz+fL,当累计得到1 500个带宽为fL的频谱信息,就已经完成1.5 M Hz带宽的扫频,完成一次频谱监测。
现有的雷达系统的一个完整的扫频周期T=125 ms,每个扫频周期的间隔Tint=3.125 ms,门控脉冲的周期Tq=3.125 ms,脉冲宽度Tp=(3.125/2)ms。也就是我们需要在(3.125/2)ms内作一次采样,现以天线接收12~13.5 M Hz的信号为例说明,为了更清楚地理解频谱监测的过程,可以看图3的信号流程图。
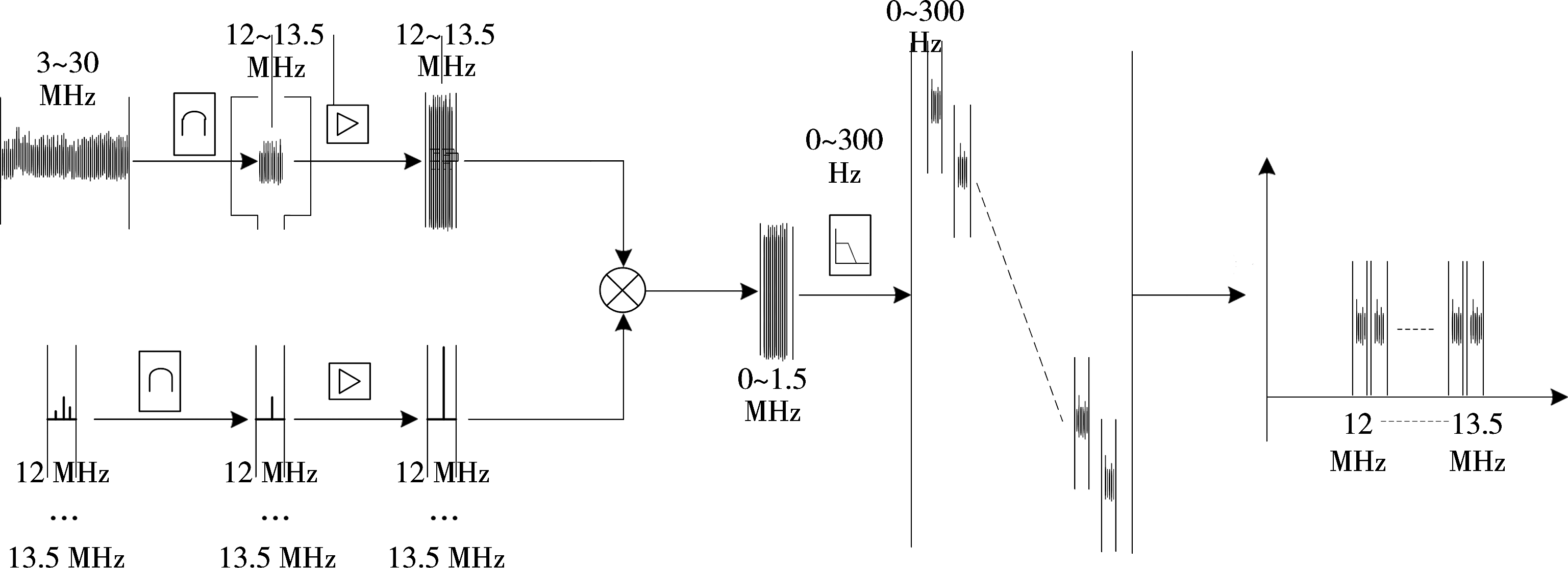
图3 频谱监测的信号流图
文中设计的频谱监测仪的低通滤波器截止频率为300 Hz,A/D采样频率为100 k Hz,每一次的频谱监测共有采样8个脉冲间隔时间(Tad=8×3.125/2)ms,则可采集1 250(100×103×8×3.125/2×10-3)个点,然后作FFT,得到300 Hz带宽内的信号信息,同时,DDS转换一次频率fL0+1 k Hz,进行下一帧的采样。如此积累,完成整个频段的频谱监测时间为(8×Tq×1 500=37 500)ms。然后对采集完的所有信号进行统计分析,得出外部噪声信号的频谱,从而为雷达选择合适的工作频率作参考。
频谱仪是研究一个给定信号,然后获得其频谱上各个频率分量的能量分布的设备。本质上就是将一个复杂的信号分解为很多单一的信号,显示各个频率点的幅度和频率的对应关系,然后得到信号的幅度和频率。
扫频超外差式频谱仪是模拟式频谱仪最常用的一种方案,其结构原理和无线电超外差接收机类似,能够完成待测监测信号频带内的扫频,并显示出各个信号分量的幅度和频率成分[10],其原理结构如图4所示。
数字式频谱仪中用的最多的是快速傅里叶变换(FFT)分析法[11],信号经模数转换后,数字化的时域信号被采样,而后经过FFT得到数字信号的频谱,其原理结构如图5所示。

图4 扫频外差式频谱仪结构图
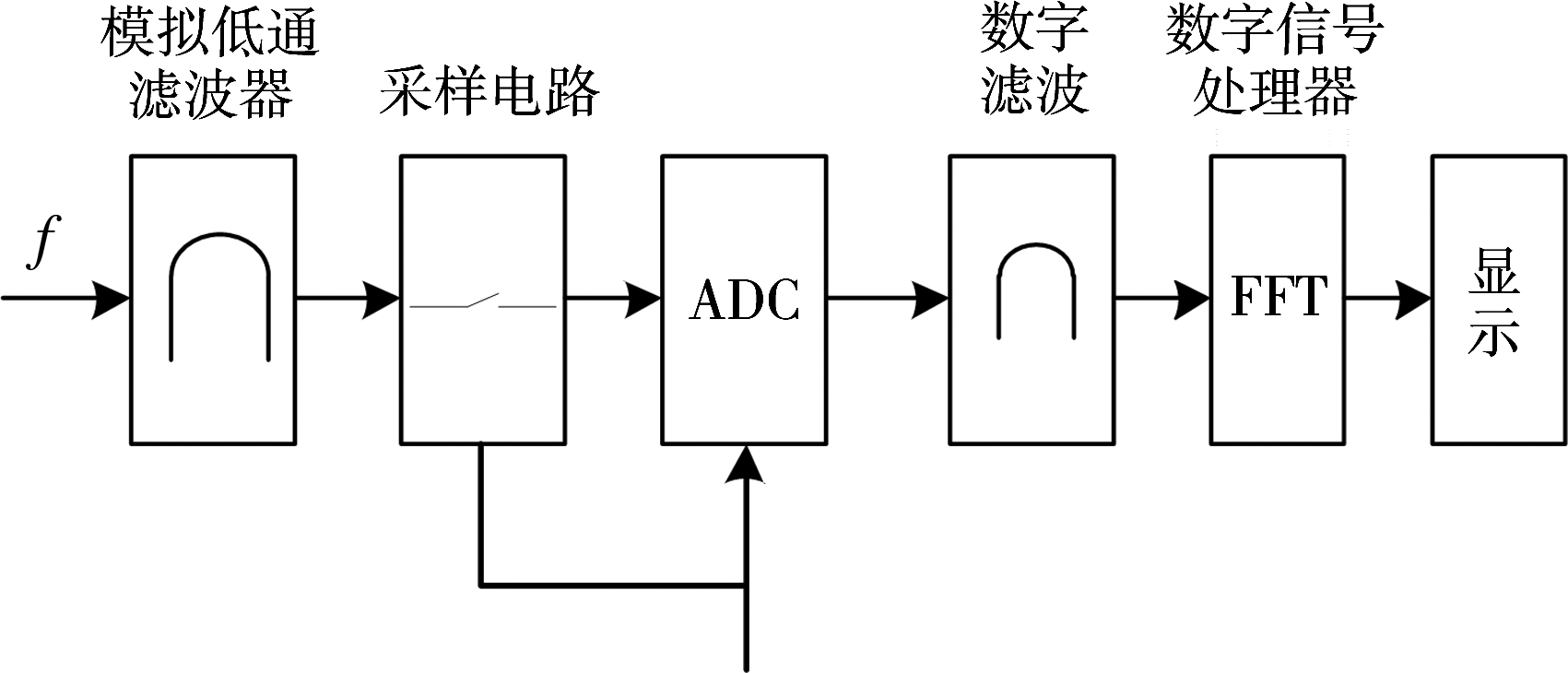
图5 FFT频谱仪简化结构
FFT频谱分析仪能够完成传统的多通道滤波器一样的功能,省去很多的带通滤波器,大大简化了系统结构,节省了成本。FFT频谱分析仪可以实现对信号谱图的实时显示,其频谱分辨率也是传统模拟频谱仪所不能比拟的。
文中结合模拟式频谱仪和数字式频谱仪各自的优点,采用扫频外差式结构和快速傅里叶分析法相结合的零中频采集方案,该方案省去了镜频抑制滤波器和混频后的中频带通滤波器,结构简单,降低硬件功耗的同时也降低了成本,并根据高频地波雷达的工作波形特点,设计了高频地波雷达的频谱监测仪,完成对雷达工作环境中的干扰和噪声的有效监测,从而提高雷达的整体性能。
频谱监测仪主要由模拟前端、DDS电路模块、A/D采样电路、USB接口电路、上位机显示软件和FPGA控制模块,以及其他附属电路等部分组成,如图6所示。
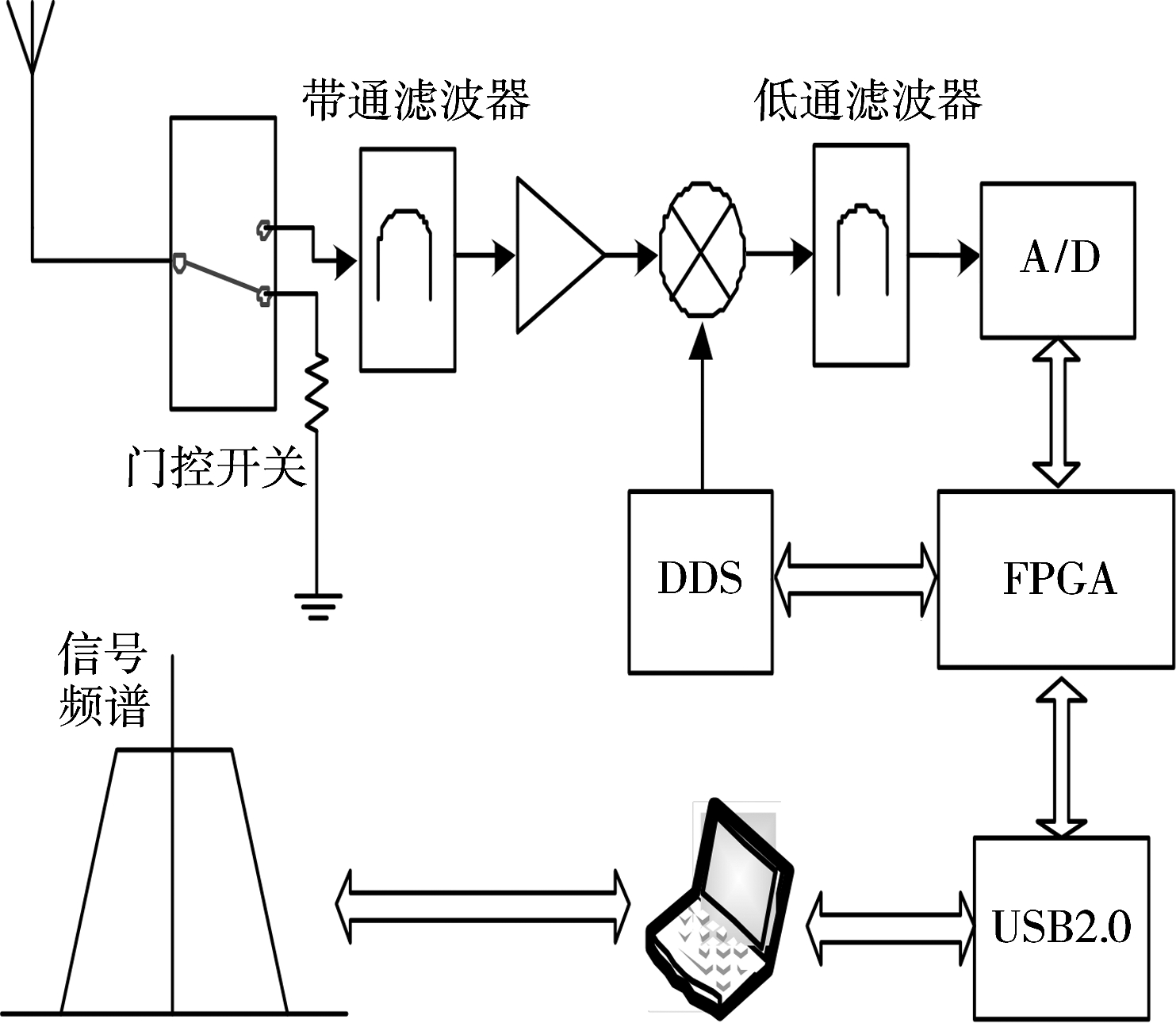
图6 频谱检测仪整体电路
在频谱监测仪系统中,有两条信号通路。第一条信号通路主要实现的功能就是通过一个带通滤波器选取噪声信号的接收频段,经过两级放大之后进入混频器的RF端,整条通路的电压增益为40 dB左右。第二条信号通路为DDS本振信号端,也是经过滤波放大,得到合适的增益,输送到混频器的L0端,该条通路的电压增益大约为52 dB。
模拟前端主要用于完成天线接收的微弱信号的放大、选取,经过混频电路,得到一个准零频信号,具体电路实现如图7所示。
DDS(数字频率合成器)电路是整个频谱监测系统主要的组成部分,主要是每隔一个扫频周期,得到一个单频信号,放大滤波后与天线进来的信号进行混频。其中通过更改其频率控制字,输出频率就相应地改变,跳频速率高,能够很好地满足本振源的输出频率,DDS电路图如图8所示。
A/D采样电路,经过混频电路出来的信号为近零频的窄带信号,采用A/D采样电路对模拟零频信号进行采样、量化和编码输出。混频后的信号为一个0~300 Hz的窄带信号,为了采样后信号不失真,我们取100 k Hz的采样频率。经过调研分析我们选取了TI公司的ADS8505这款A/D芯片,A/D采样外围电路如图9所示。
在整个系统中,FPGA控制模块起着关键的作用,负责协调整个系统的运作,包括对DDS模块的配置产生所需的本振信号,对A/D采样器进行时序的控制使得采集准确的外部噪声信号,同时对USB芯片进行控制,使得后端的数据可以正确地传输,FPGA模块是该频谱监测设备的中枢,只有合理的设计,才能让整个系统运行,达到我们的要求。
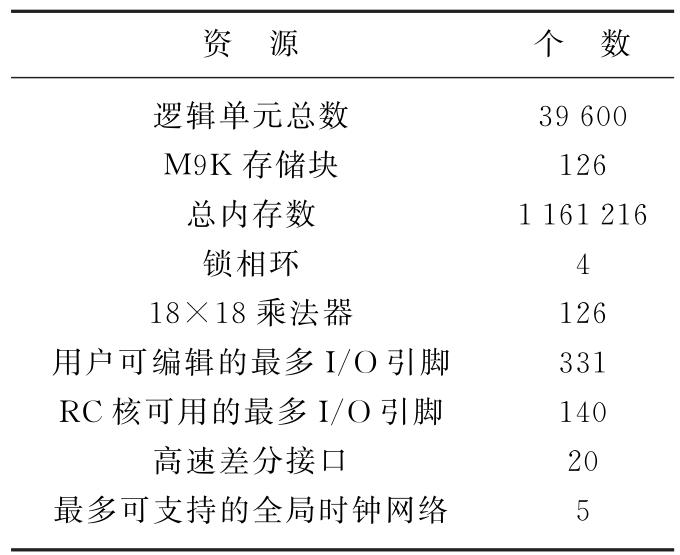
系统采用ALTERA公司的CYCLONEIII系列的EP3C40F484C6芯片,该芯片功耗较低,性能良好,是一款应用比较广泛的可编程门阵列器件,其资源比较丰富,如表1所示。
表1 EF3C40F484资源列表
控制程序的编写使用Quartus II开发软件,图10为综合后的RTL视图。
FPGA控制的程序,主要包括A/D的采样控制和USB数据传输的控制,以下分别进行说明。
1)A/D采样控制
系统采用的A/D采样芯片为ADS8505,该芯片控制相对简单,控制时序要求转换时间在40~1 750 ns之间,本系统设为1 000 ns,保证每次数据能完成转换,最后产生一个周期为10 ns的采样信号,其中低电平持续时间为1 000 ns。
2)USB数据传输的控制
系统采用零中频结构,混频之后低通滤波器最后得到的是一个0~300 Hz的窄带信号,经有100 k Hz的采样率对其采样,进入FPGA,等待传输。若是采用同步写模式这里存在一个问题就是数据率的匹配,采样时钟为100 k Hz,而USB传输控制模块的时钟则是48 MHz,相差几百倍,如果不经任何处理,会导致传输出来的数据存在重大的误差。这里面就需要一个重要模块FIFO——进行调节,以解决两个时钟的不匹配导致的数据率的不同。本文为了方便稳定,采用了Quartus里面的IP核模块进行设计。
通过Signal Tap抓取的数据流图如图11所示,由A/D采样后的数据进入FPGA后,在通过USB的控制程序,进入USB设备的数据是一致的。程序调试完成以后,将程序编译后的烧录文件以AS模式下载到从配置期间EPCS中去,只要上电就可以运行固化好的程序。
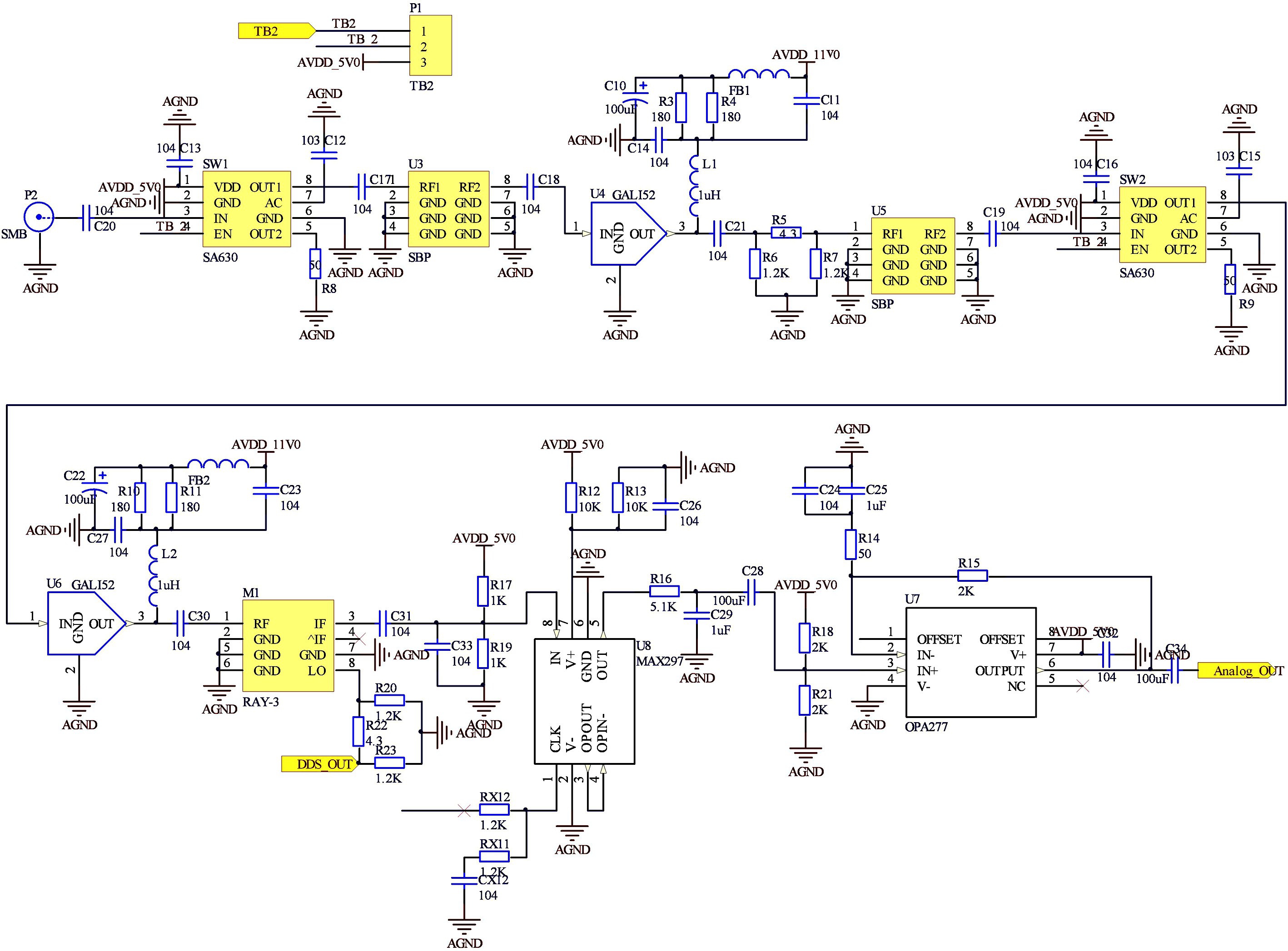
图7 模拟前端电路

图8 DDS电路图
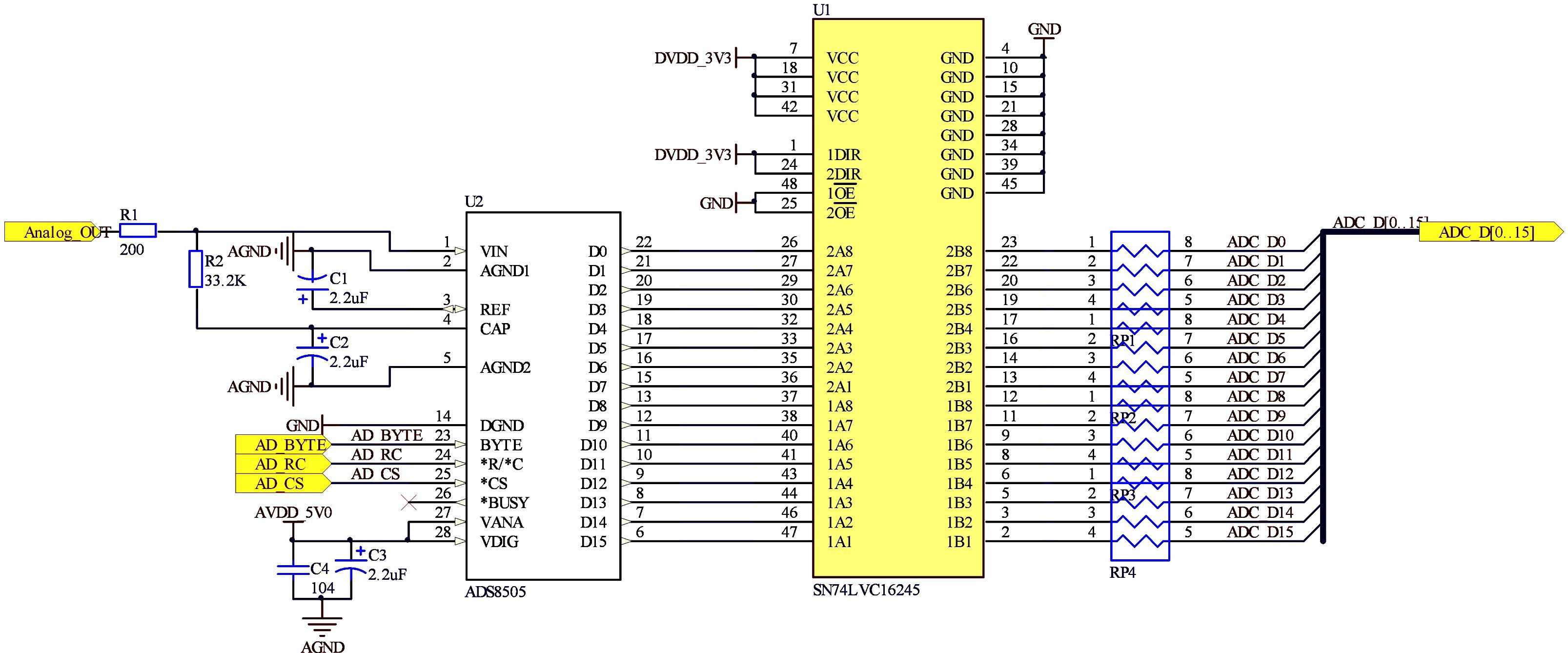
图9 A/D采样电路

图10 FPGA控制程序RTL视图
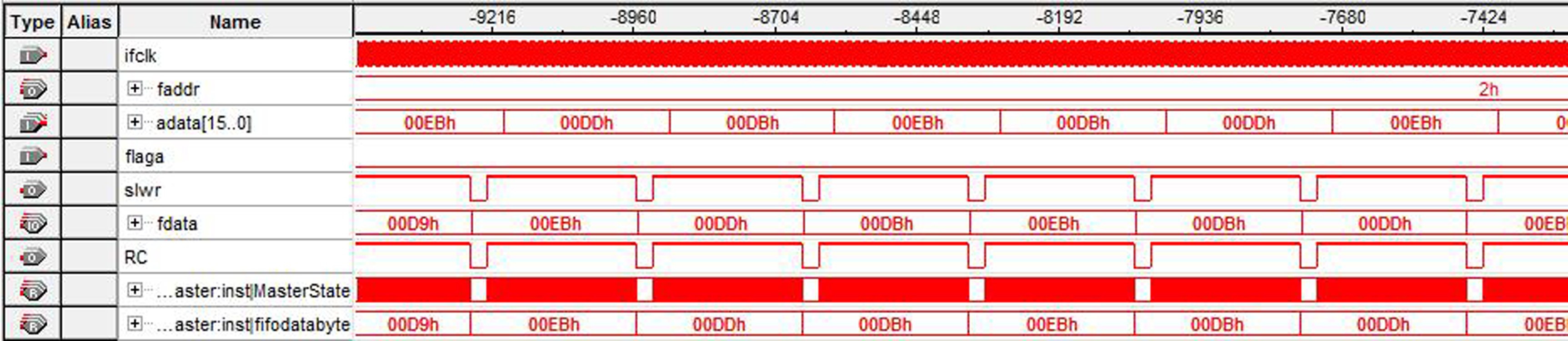
图11 Signal Tap抓取数据流图
USB电路的设计及USB数据传输的固件和上位机软件,这里就不详细介绍了。整个系统的硬件实现如图12所示。
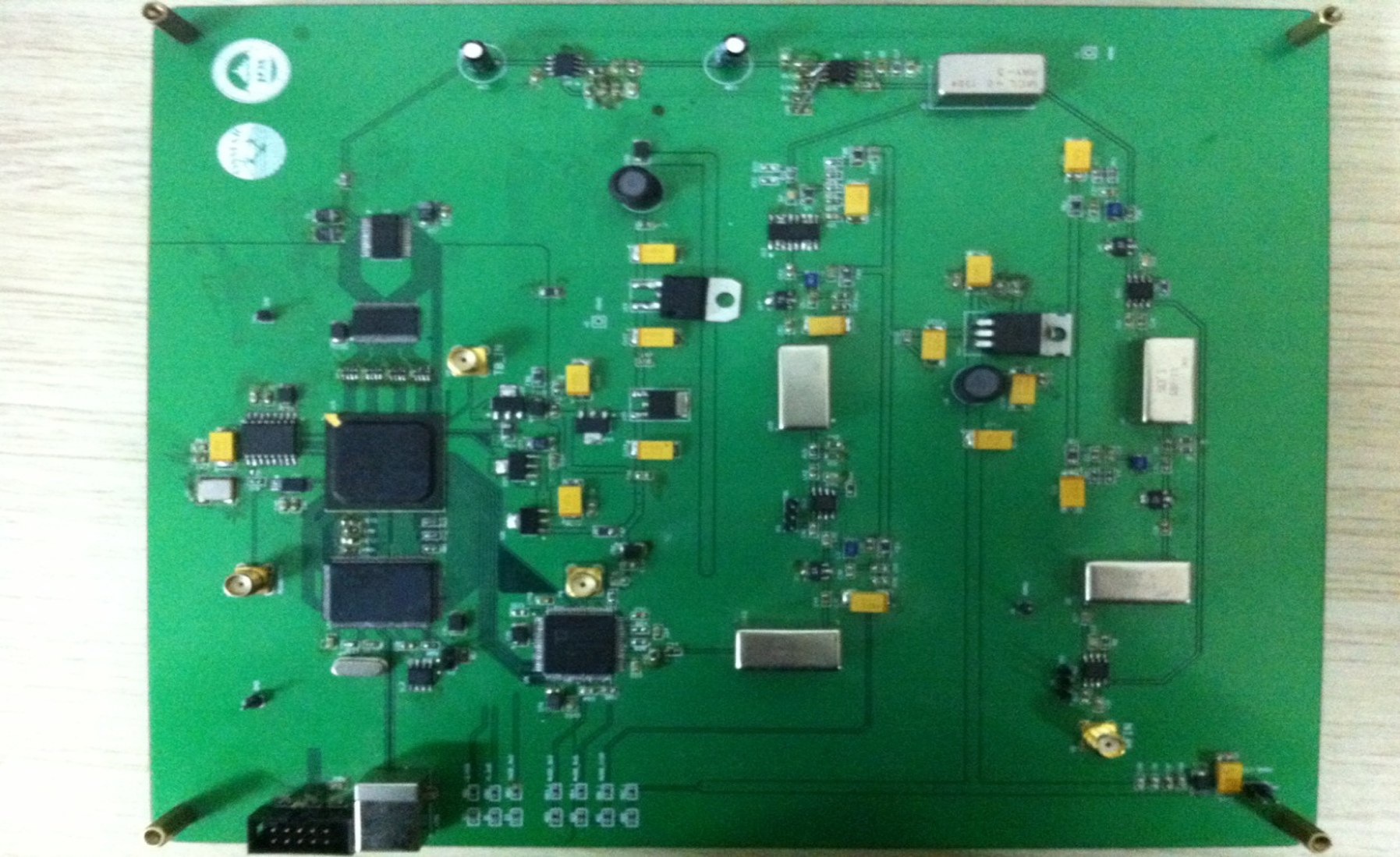
图12 频谱监测仪的硬件实现
前期调试,RF信号采用13 MHz的单频信号,而本振信号为与RF信号相差200 Hz的单频信号(13.000 2 MHz),可以验证频谱仪的接收前端的正确合理性,然后用示波器检测混频之后待进入A/D采样转换电路的信号,可以得到一个幅度符合我们所需要的200 Hz的信号。
通过硬件电路的设计和上位机实时频谱显示软件,采样后的数据实时谱如图13所示。
为了验证频谱显示的正确性,我们把上位机的数据导出,然后将数据导入到 Matlab中,作FFT变换,得到噪声谱图,如图14所示。
在谱图中峰值对应的频率为195.3 Hz,这与模拟信号频率200 Hz的信号是相对应的。因为采样频率是100 k Hz,采样点数为1 024点,则频谱的分辨率为97.65 Hz。如果作FFT处理时,点数足够多,所得到的峰值对应的频率将会无限接近或等于200 Hz。200 Hz的信号可以对应 Matlab谱图中195.3 Hz,实时谱图显示正确,由此我们验证了该频谱监测仪设计的合理性。
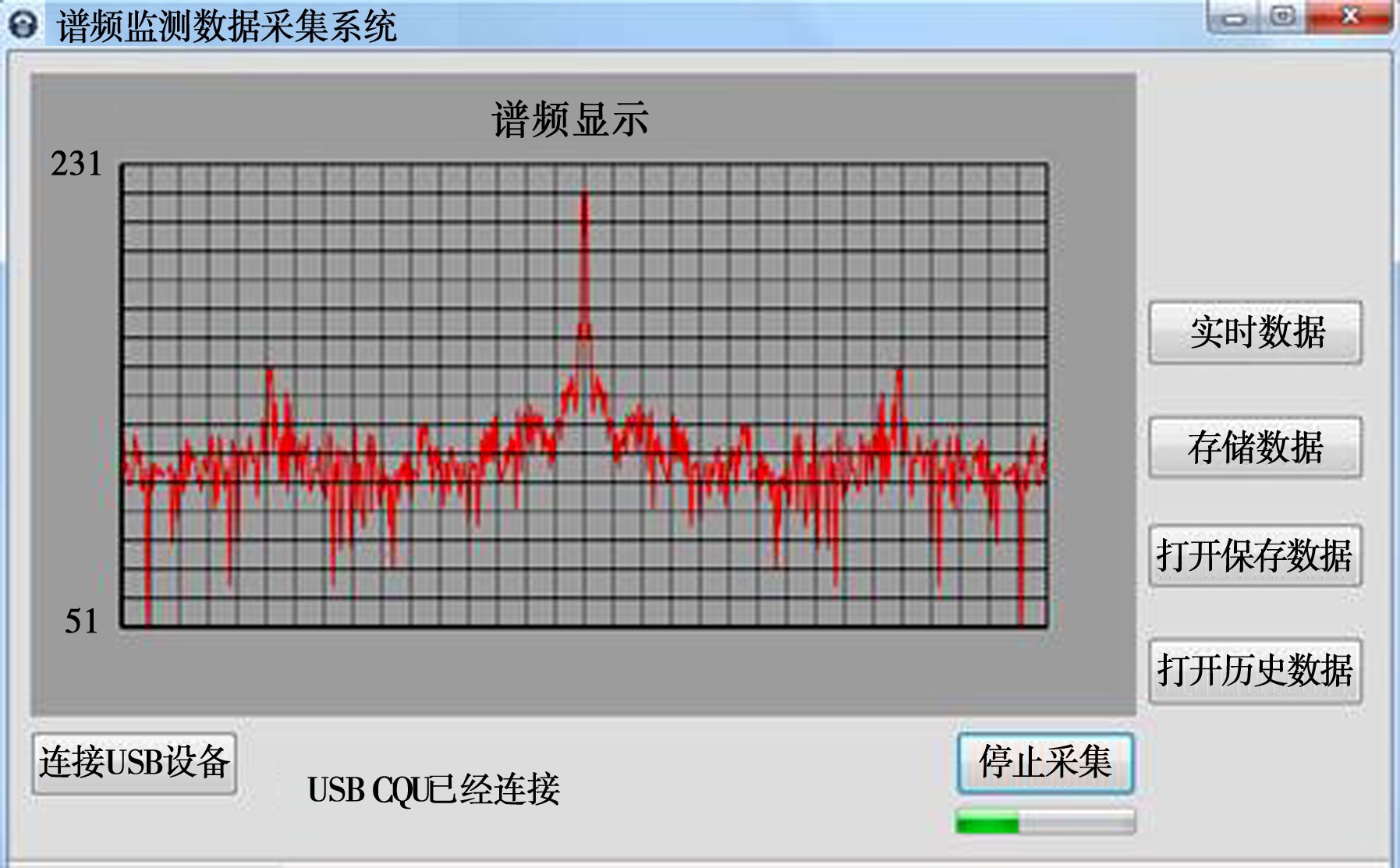
图13 数据采集的频谱显示
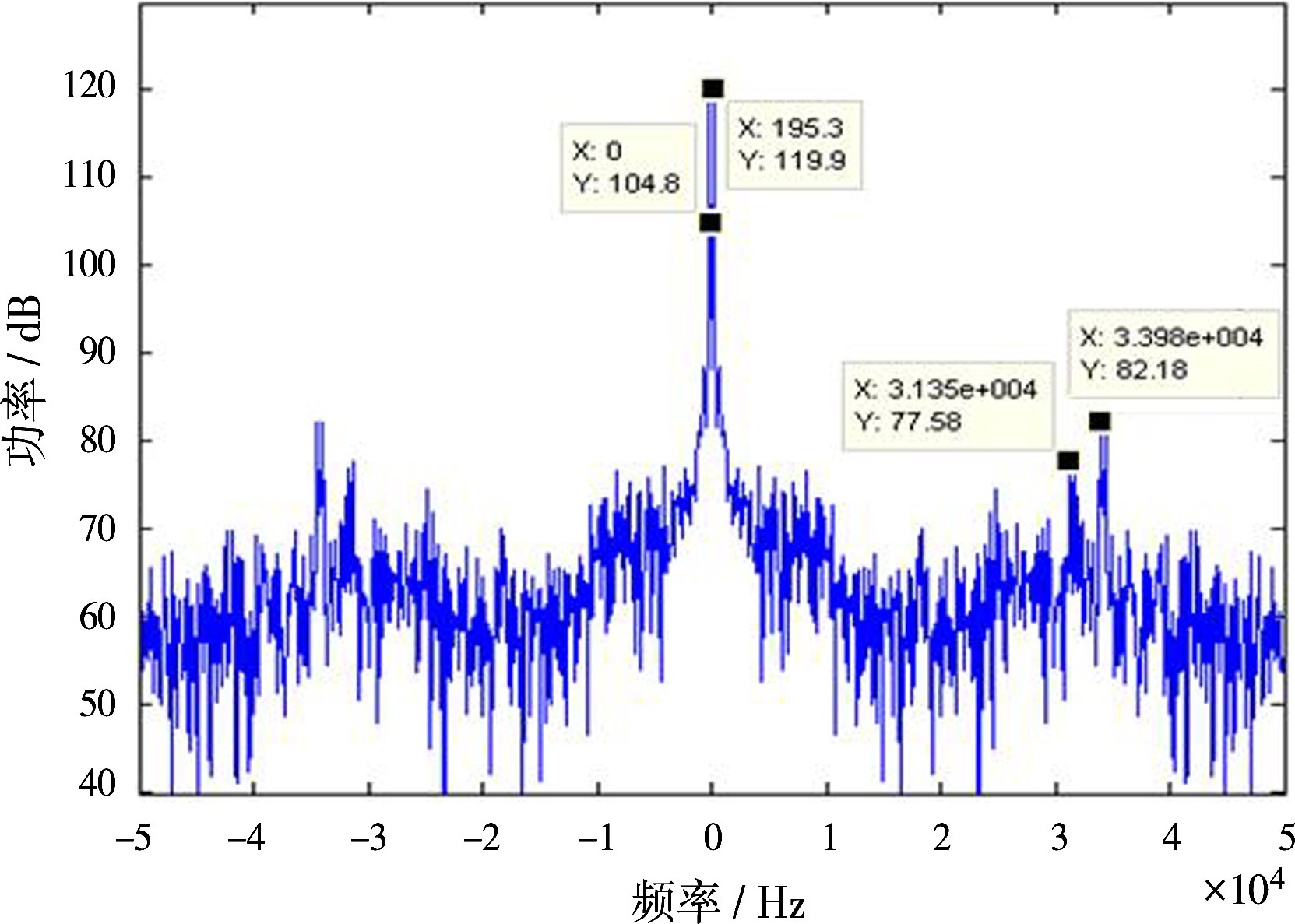
图14 存储数据的频谱图
结合模拟式频谱仪和数字式频谱仪各自的优点,采用外差式结构和快速傅里叶分析法相结合的零中频采集方案,设计并实现了该频谱监测方案,闭环实验结果验证了本频谱仪设计方案的合理性。在雷达扫频的间隙期,对外部噪声进行采集、处理,从而能让雷达选择信噪比较高的工作频段,该设备应用在高频地波雷达双频系统,对后期海洋的动力学参数和目标的监测能力都会有比较好的改善。
参考文献:
[1]BARRICK D E,HEADRICK J M,BOGLE R W,et al.Sea Backscatter at HF:Interpretation and Utilization of the Echo[J].Proceedings of the IEEE,1974,62(6):673-680.
[2]吴雄斌,张兰,柳剑飞.海洋雷达探测技术综述[J].海洋技术学报,2015,34(3):8-14.
[3]田建生,杨子杰,陈泽宗.中频带通采样雷达噪声频谱在线监测方法[J].电波科学学报,2005,20(3):284-288.
[4]LAMANNA M,MONSURRÒP,TOMMASINO P,et al.Spectrum Estimation for Cognitive Radar[C]∥European Radar Conference(EuRAD),[S.l.]:[s.n.],2015.
[5]李正勇,严颂华,刘志忠,等.天地波组网雷达同步控制系统设计[J].雷达科学与技术,2014,12(5):473-481.LI Zhengyong,YAN Songhua,LIU Zhizhong,et al.Synchronous Control System Design of Hybrid Sky-Surface Wave Radar Network[J].Radar Science and Technology,2014,12(5):473-481.(in Chinese)
[6]杨子杰,吴世才,侯杰昌,等.高频地波雷达总体方案及工程实施中的几个主要问题[J].武汉大学学报(理学版),2001,47(5):513-518.
[7]YANG Z,YANG L,FU Y.Spectrum Prediction for High-Frequency Radar Based on Extreme Learning Machine[C]∥International Conference on Advanced Computational Intelligence,[S.l.]:IEEE,2015.
[8]马彦恒,宋瑶,董健.空地双基地雷达空间同步研究[J].雷达科学与技术,2015,13(1):65-69.
[9]陈伯孝,李锋林,潘孟冠.岸-舰双基地地波超视距雷达技术[J].雷达科学与技术,2015,13(4):333-339.
[10]李吉宁,娄鹏,郭文玲,等.高频地波雷达电波环境特性分析[J].中国电子科学研究院学报,2014,9(4):365-369.
[11]李飞.傅里叶频谱分析仪的算法设计与实现[D].成都:电子科技大学,2013.
Design of Frequency Spectrum Monitoring Analyzer for High Frequency Surface Wave Radar
TANG Rui,YUE Xianchang,ZHANG Lan,WANG Shiwei
(School of Electronic Information,Wuhan University,Wuhan430072,China)
Abstract:Suffering from the external environment and noises,the signal quality of the high frequency surface wave radar(HFSWR)is unsatisfactory.In order to detect the frequency spectrum of the noises to make the HFSWR work normally in the frequency bands in which the signal noise ratio(SNR)is perfect,a frequency spectrum monitoring analyzer is designed for the HFSWR developed by Radio Oceanography Laboratory of Wuhan University.By combining the advantage of the structure and principle of the traditional and digital spectrometer and considering the radar waveform design and detection principle of HFSWR,we propose a spectrum monitoring principle based on the heterodyne structure and fast Fourier transform(FFT)algorithm.This principle has been implemented in practice.In addition,the verification and simulation results demonstrate that it can detect the external noises effectively and satisfy the need of a new generation of radar system.It will have a better improvement for subsequent radar data acquisition and processing.
Key words:high frequency surface wave radar(HFSWR);spectrum monitoring;heterodyne structure;fast Fourier transform
中图分类号:TN957.51
文献标志码:A
文章编号:1672-2337(2017)01-0108-07
DOI:10.3969/j.issn.1672-2337.2017.01.020
收稿日期:2016-07-04;
修回日期:2016-08-20
基金项目:国家自然科学基金青年基金(No.61401316);国家863计划(No.2012AA091701)
作者简介:

唐瑞男,1991年生,湖北襄阳人,武汉大学硕士研究生,主要研究方向为无线电海洋遥感。E-mail:Mr Tang@whu.edu.cn
岳显昌男,1975年生,辽宁人,武汉大学电子信息学院副教授,主要研究方向为中高层大气及海洋数值建模。
张兰女,1981年生,湖北襄阳人,武汉大学电子信息学院实验师,主要研究方向为雷达信号处理。
王市委男,1987年生,山东人,武汉大学博士研究生,主要研究方向为无线电海洋遥感。