0 引言
机载监视雷达系统是一种全天候全天时远距离广域对地主动式监视系统,它穿透性好,能高分辨率、大范围成像和进行地面、海面静止/固定目标,地面、海面和低空动目标检测、跟踪和监视。夺取信息优势是当代与未来战争取胜的关键要素,战场侦察雷达是获取战场情报的主要信息来源,是信息化战争中不可缺少的信息探测装备[1],已广泛用于侦察、目标识别、目标指示和打击效果评估等军事领域。其中,装载了机载监视雷达的美国JSTARS(联合监视与目标攻击雷达系统)在海湾战争、巴尔干地区的维和行动以及阿富汗和伊拉克的军事行动中,发挥了重要作用[2]。
就平台而言,大型机载监视雷达系统虽然具有广域侦察监视能力,但由于高昂的装备使用费用,部署数量不足,难以对特定区域进行全天24小时连续监视;而无人机侦察系统依靠长航时、低成本、高安全性成为有人机载侦察系统的理想辅助侦察系统。但是典型的战场侦察雷达与无人机载侦察雷达的工作环境不同,这对雷达的关键技术提出了新的要求与挑战[3]。在无人机载科研试飞前,均需要在有人机载条件下挂飞,因此雷达软件系统的设计必须要兼具它机本机适应性飞行任务。本文针对机载监视雷达软件系统进行了研究,论述了系统组成及特点,并对某些关键技术进行了说明,最后给出了仿真实验结果。
1 机载监视雷达软件系统设计
1.1 软件系统设计方案
机载监视雷达系统由机载设备和地面站设备组成,如图1所示。其中,机载设备主要包括雷达天线、电源分机、运补分机、接收分机、综合电子分机、实时处理分机、数据处理分机、数据记录器、显控台(有人机载)和机载数据链;地面站设备主要包括地面站系统和地面站数据链。
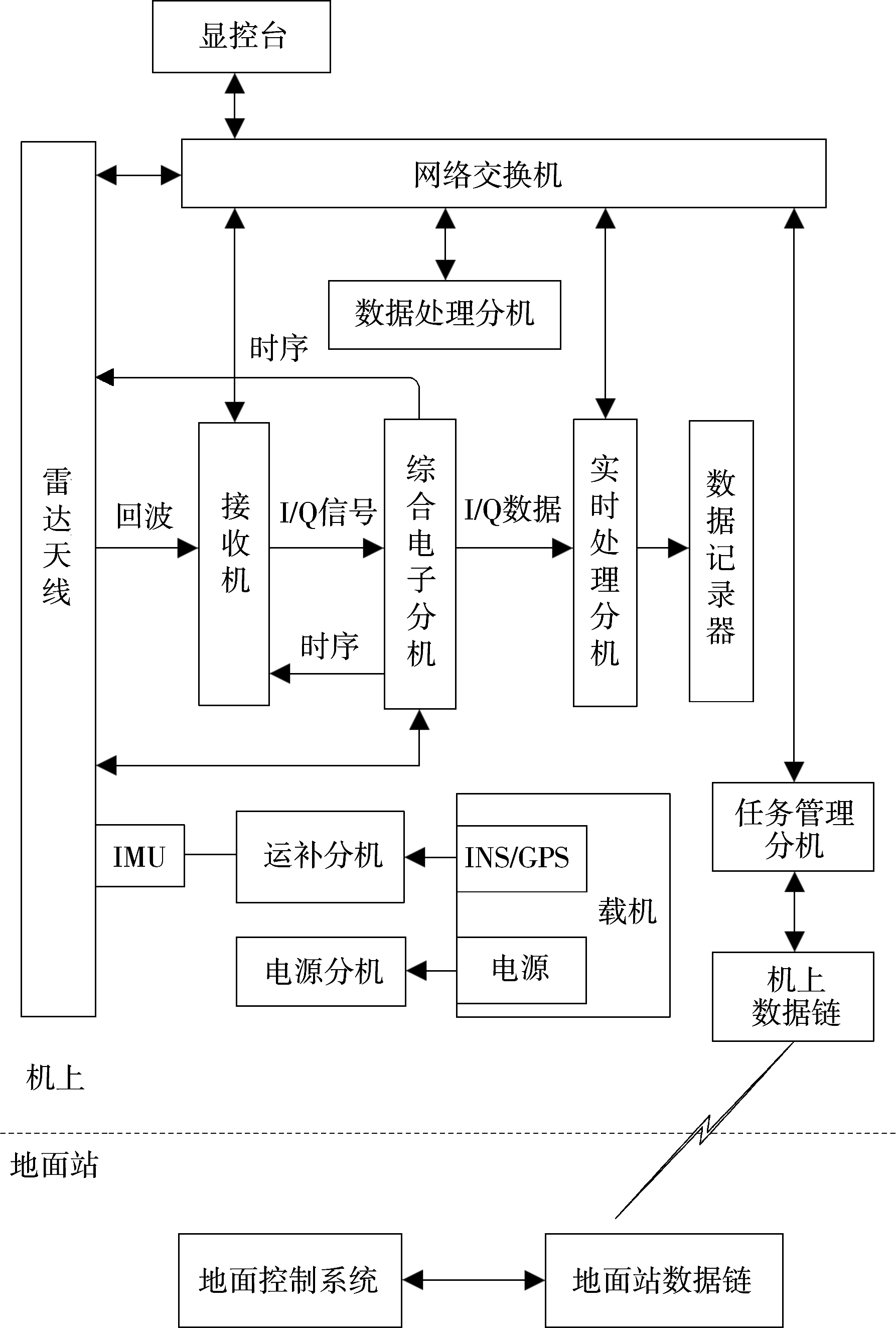
图1 机载监视雷达系统组成框图
在对地面运动目标进行搜索检测时,通过二维有源相控阵天线全孔径发射信号,多个子孔径同时接收信号,接收单元中的多个MTI接收通道同时进行下变频和I/Q正交解调后,将I/Q信号送接收机进行数据变换,变换的数据和工作参数经综合电子分机打包后送入实时处理分机中,进行时空二维、杂波干涉等自适应处理,抑制强地杂波,提取地面慢速运动目标轨迹,在数据处理单元进行滤波和预测处理、点迹凝聚、航迹相关以及坐标变换等,将动目标的航迹用符号叠加在SAR图像或电子地图上,形成完整的战场态势图,并通过数据链下传到地面控制系统(含指挥中心)以供二次信息处理和指挥决策。如须配合火力的攻击,即为了精确打击目标,须提供敌军的位置和速度信息给炮弹、导弹,并对打击后的目标区域进行监视[4]。
本系统基于多任务多模式要求研制,不仅须适应雷达内外控制信息需求,且要求适用多种试验飞行方案。当载机为无人机时,设备操作员不能上机试飞,须由地面站进行遥控并显示侦察数据和雷达状态信息;当载机为有人机时,设备操作员可以上飞机进行操作,可在机上进行雷达控制并显示侦察数据和雷达状态信息,同时要求可在地面站进行遥控显示。因此软件设计方案中,将综合任务管理软件作为整个软件系统的信息交换枢纽,负责雷达内外不同信息的交换翻译及控制方式切换工作,适应机上本控和地面站遥控不同任务多模式需求,并采用尽可能少的资源满足各任务功能需求,实现软件配置项之间低耦合,系统集成可靠性高,并且易移植、维护简易可行。
其中,当适用有人机方案时,指挥中心也可以搬到飞机上,成为空中指挥中心。
机载监视雷达软件系统数据链路图如图2所示。
在硬件具备支撑条件下的软件配置项采用多种传输接口方式,控制软件之间的信息传输采用光纤、总线、串口传输方式,计算机软件之间采用网络互联,机上机下计算机软件分别接入两个星型网络拓扑,完成对雷达探测控制及侦察信息处理任务。
系统完成3种控制方式,第一种方式为雷达本控,所有雷达设备包括控制设备放在飞机上,由雷达显控发出控制命令;第二种方式为地面站遥控,地面站配备通信车,和雷达进行无线链路通信,控制显示终端位于地面站,对雷达发出控制命令,并显示动目标和图像画面,然后将实时信息传输至指挥中心进行攻击策划控制。该方式中,飞机上的雷达显控作为维护显示器,该模式也可适应于无人机挂载方案;第三种方式为指挥中心控制,该指挥中心位于飞机,采用任务列表方式对雷达进行控制并显示雷达侦察信息画面,雷达显控作为维护显示器。
机载监视雷达系统软件主要完成雷达系统各工作模式波束资源调度,控制时序和波束指向,对探测到的目标原始回波进行实时信号处理,进行地面动目标检测定位和跟踪,最后形成航迹显示在SAR图像或电子地图背景画面上,并对打击后的动目标进行区域监视。
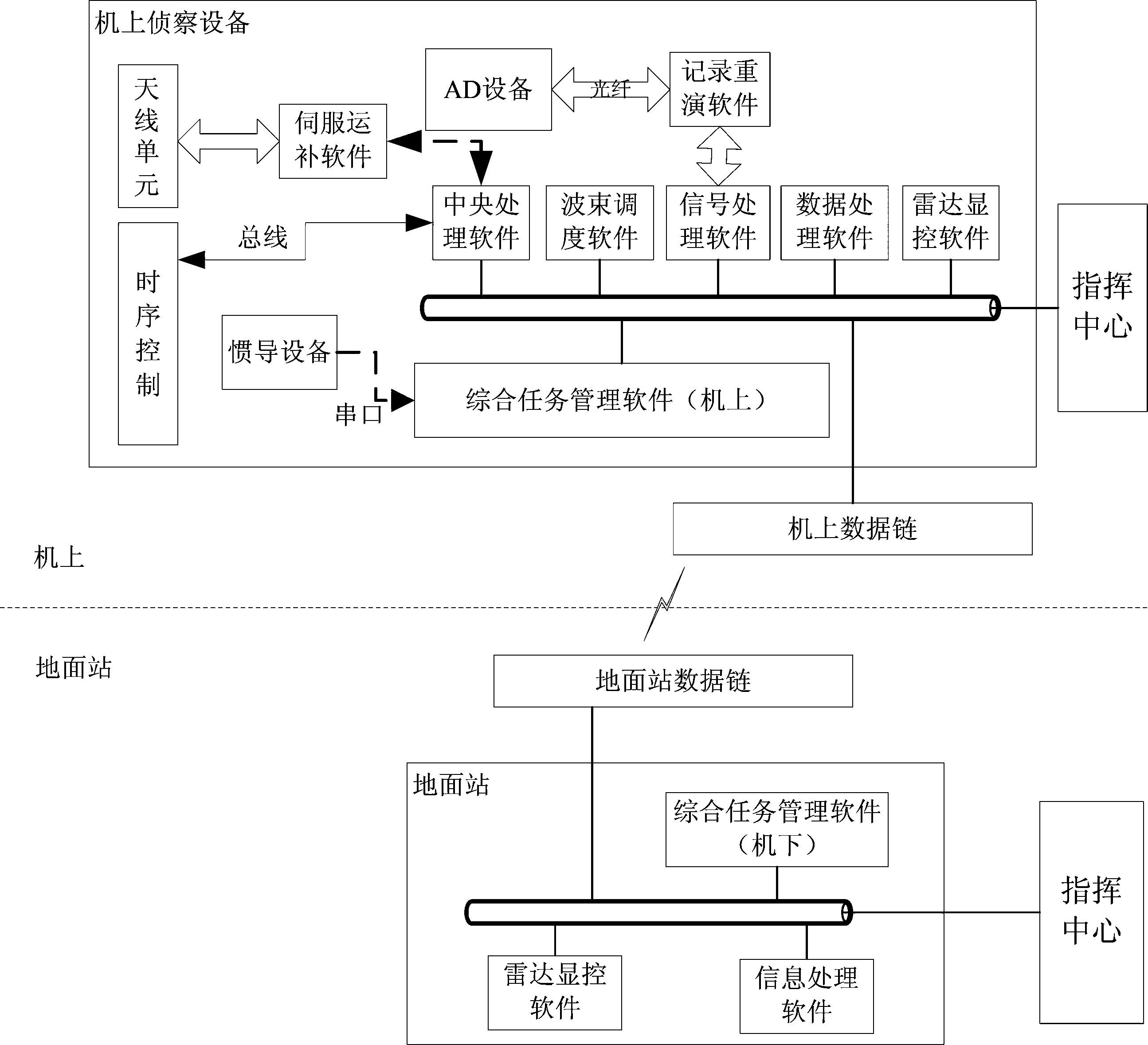
图2 软件系统数据链路图
1.2 机载监视软件任务方案设计
本机载监视雷达软件系统的基本模式设计为:
1)广域搜索(WAS):雷达系统的基本工作模式(缺省模式),覆盖战区,能对雷达视场内的地面运动目标进行探测、定位、分类;
2)扇区搜索(SS)模式:用于雷达探测范围内指定区域的搜索,该区域回访时间间隔比 WAS短,时间间隔设置的原则是保证对操作员指定目标的自动跟踪;
3)攻击策划模式(AP)模式:用于雷达探测范围内指定小区域的搜索,该区域回访时间间隔比SS短,时间间隔设置的原则是保证攻击策划阶段使用;
4)攻击控制模式(AC)模式:用于雷达探测范围内指定小区域的搜索,系统反应最快(最短波束回访时间间隔),时间间隔设置的原则是保证攻击实施阶段使用。
工作模式可以作为一个单一任务执行,也可以作为一个子任务在察打任务中进行编排执行,一般事先规划好任务列表。察打任务执行时,雷达首先进行大范围广域搜索,进入重点区域后,切换到扇区搜索模式,区域态势实时报指挥中心,进入攻击策划阶段,采用高数据率对重点目标进行探测跟踪,进入到攻击实施阶段时,则采用更短的回访时间对重点目标进行高精度回访和跟踪,并引导武器实施打击。机载监视雷达工作模式切换如图3所示。
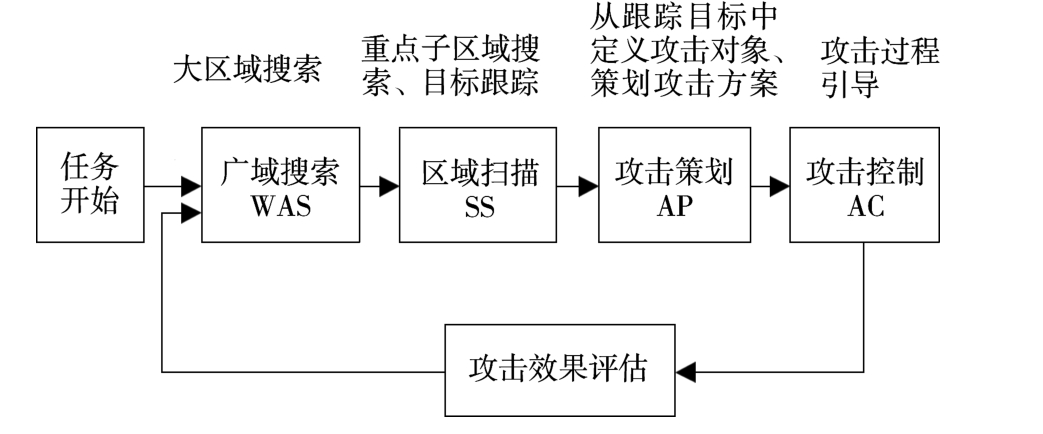
图3 机载监视雷达工作模式切换
任务执行方案可以采取航线规划、时间规划和实时控制三种方式执行。
1)航线规划,即按照既定航线规划,根据当前飞行位置确定执行哪个任务;
2)时间规划,即按照既定任务列表的时间顺序进行任务调度;
3)实时控制,即操作员进行实时任务调度。
某典型任务时间规划设计方案如图4所示,将每一个工作模式看成是一个子任务,结合任务作战需求和雷达能量合理编排子任务及其回访时间,称之为“时间片轮转”复合任务列表,该典型任务列表设计方案下,一个任务需要完成1个WAS子任务和多个AP,AC子任务,WAS任务持续时间为20 s,数据率不固定,AC,AP分别持续时间为100 ms,AP数据率为15 s,AC数据率为10 s。在该任务列表中,需要实现的功能是WAS可以实现大区域目标跟踪,AP,AC实现小区域重点目标跟踪。进行动目标数据处理时,将WAS和AP,AC任务分别提取出来,在各自的任务执行中可以进行自关联,也可以将AP,AC任务获取的点迹分别和WAS任务中的航迹进行关联,提高重点目标的数据率。

图4 多任务协同拼接
1.3 资源调度设计
在MTI类任务列表中,最多可包括4种模式的任务(WAS,AC,AP和SS),各个任务之间须瞬时切换,因此要求时序参数及波束参数能动态实时同步控制。
本资源调度设计兼顾航线规划、时间规划和实时控制三种任务调度方式。由波束调度软件根据3种不同的任务调度方式生成子任务队列,并转换成当前任务待执行队列,在收到码值请求中断后,提前将子任务波控参数发送给波束控制软件,控制移相器码值[5]。资源调度流程如图5所示。
1.4 变扫描策略下的数据关联
为了保证对重点区域重点目标进行长时可持续跟踪,在雷达探测距离不变的情况下,采用AP,AC模式可以最大限度地延长照射。AP,AC模式是根据探测对象的经纬度计算波束的扫描角度,控制波束一直照射该区域,即变扫描策略,类似于聚束照射,无论是从SS模式切换到AP,AC模式,还是AP,AC模式自行切换时,都会进行波束切换,这时数据率是变化的。在变波束扫描时,如何保证波束切换后航迹信息无损是关键所在。
常规的解决方法是波束切换时按丢点处理,这样在下一个扫描周期来到时,如果没有点迹与航迹匹配上,按丢点后补点处理。这样会导致信息冗余,且容易造成目标跟丢。
提出的解决方法是一旦波束切换,调整暂时航迹缓区和稳定航迹缓区内航迹的预置参数门限,并重新预测航迹在点迹时刻的位置和多普勒信息,再进行点航匹配,如图6所示。这样在波束切换前后能保证点迹和航迹可以实现无缝匹配,不补点、不丢点、不丢批。
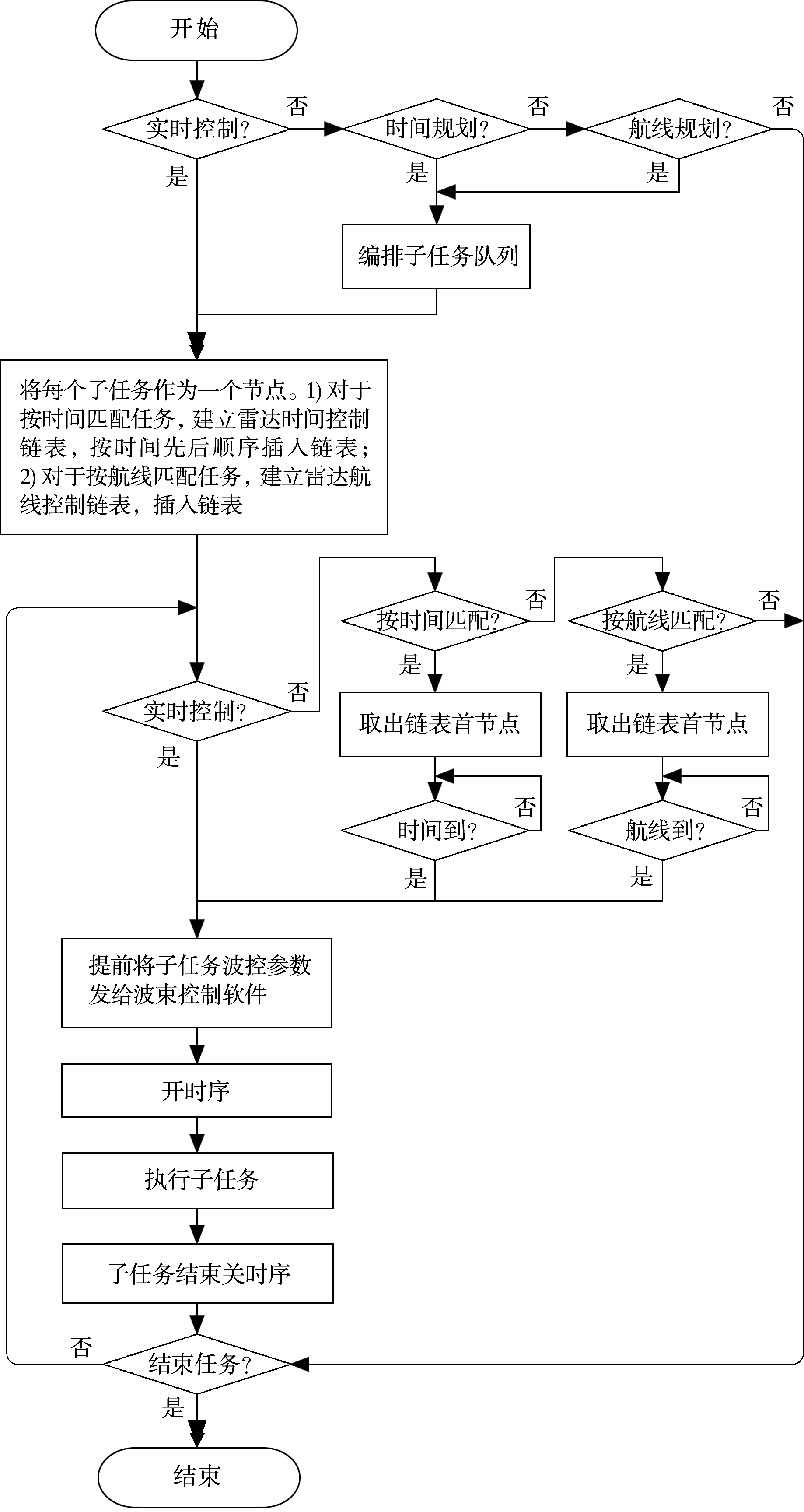
图5 资源调度流程
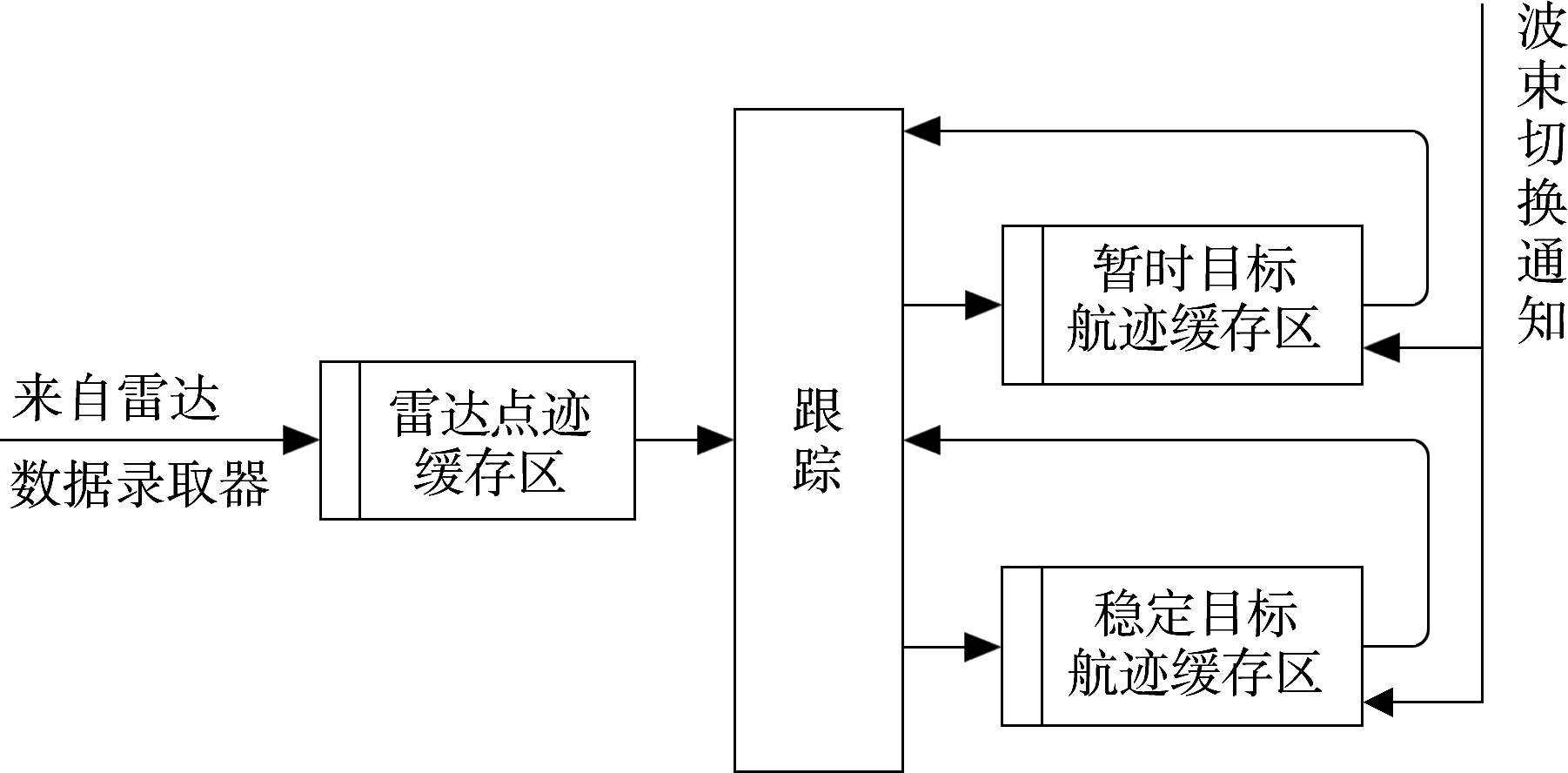
图6 变扫描策略跟踪解决方案
2 试验结果
根据本系统方案搭建地面半实物仿真系统,并模拟指挥大厅对发现目标进行打击控制和打击后区域显示,仿真系统组成如图7所示。
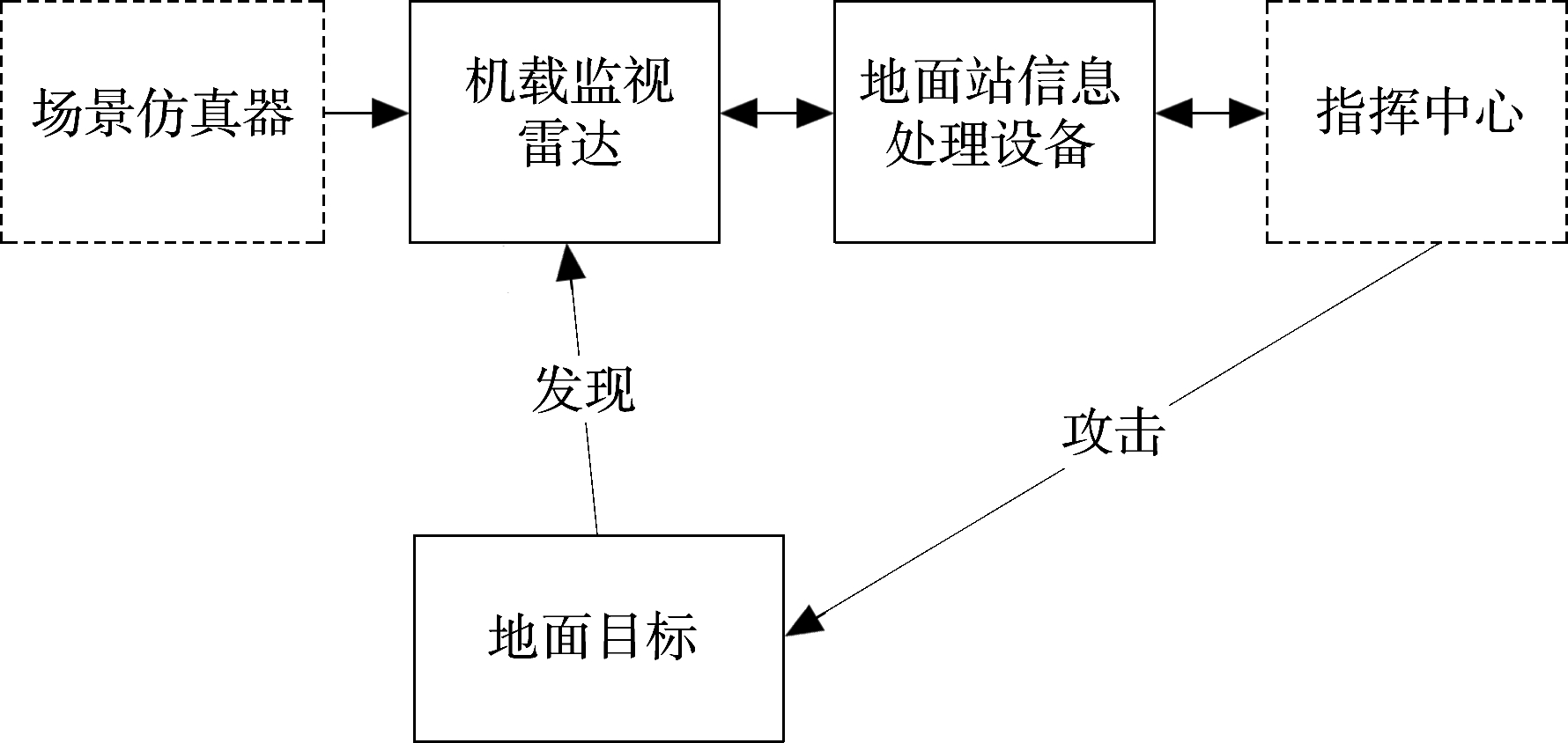
图7 地面半实物仿真系统组成
场景仿真器模拟目标航线、参数设置和惯导参数,产生目标原始数据输出到机载监视雷达,送入地面站信息处理设备,进行动目标发现和跟踪后传递到模拟指挥中心进行显示,指挥中心对发现的目标进行打击指挥决策,最后在地面站信息处理设备和指挥中心给出打击后的监视画面。通过本仿真系统验证了系统设计的可行性,图8和图9分别为动目标打击前后画面。
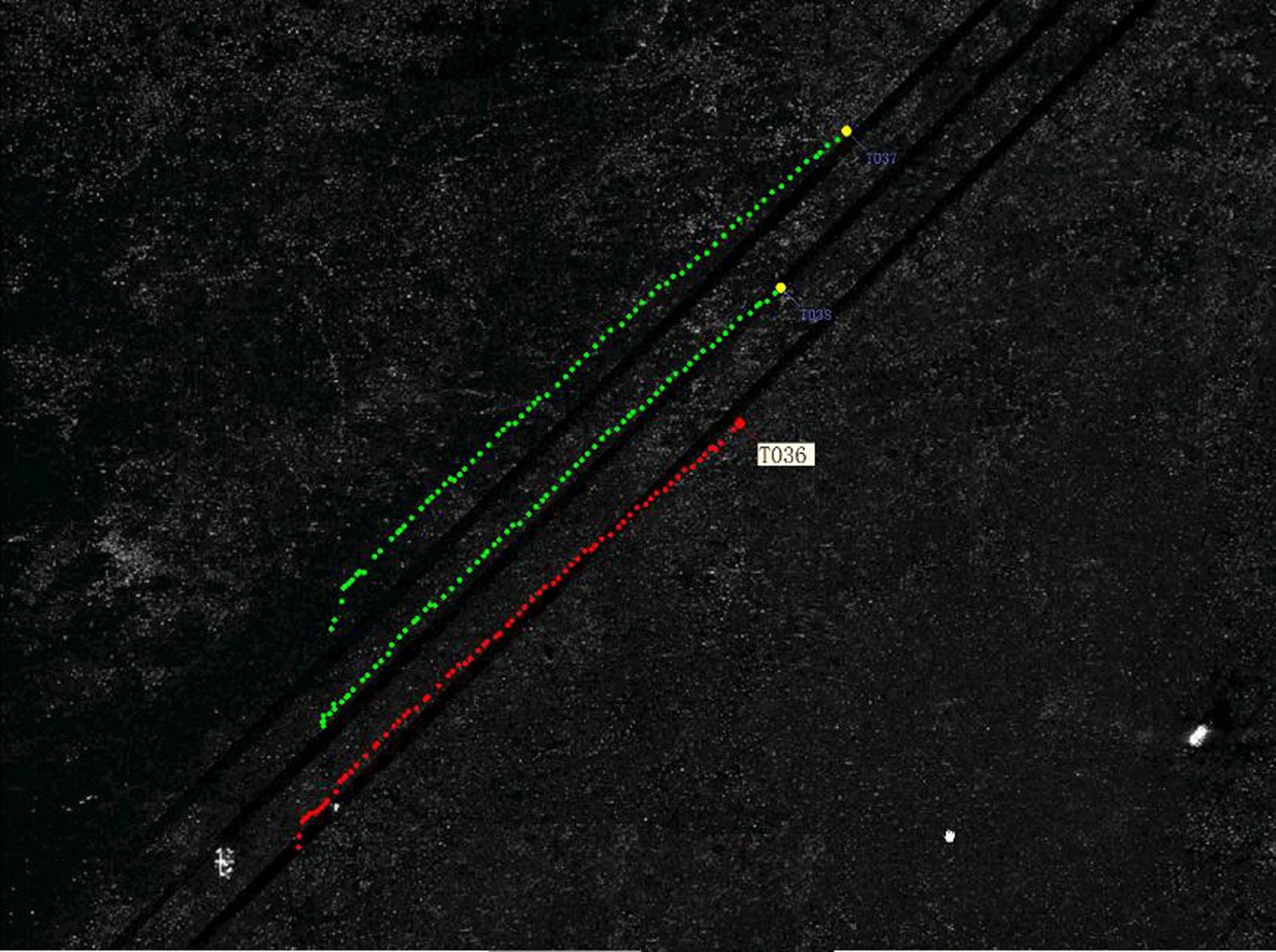
图8 发现目标画面
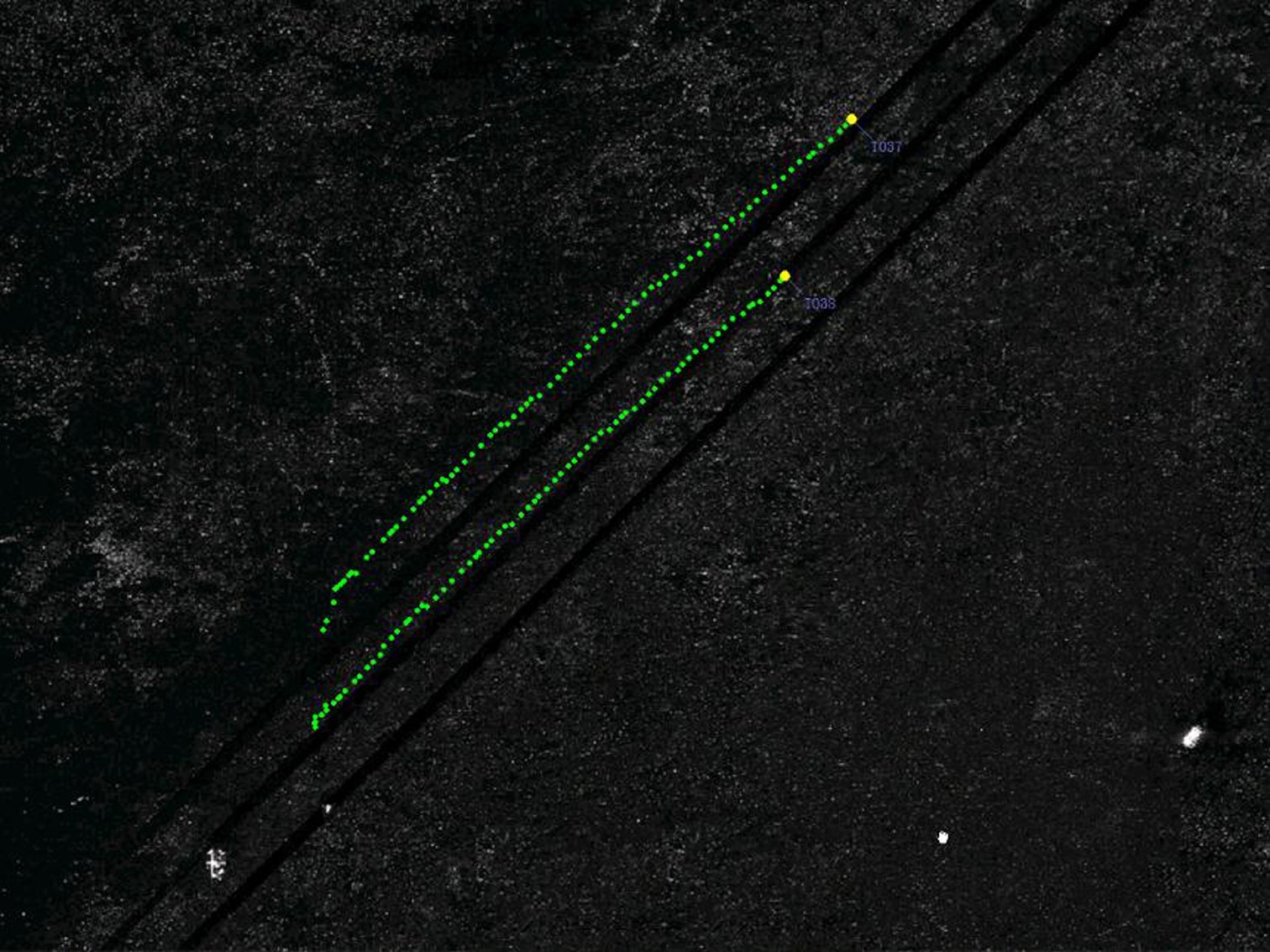
图9 打击目标后画面
3 结束语
本文提出了一种兼容使用于有人机和无人机的机载监视雷达软件体系架构设计,并对方案设计、资源调度设计以及变扫描速率下的数据处理关联方案作了阐述。该软件架构设计方案和关键技术的相关思路和流程可以推广应用在机载监视雷达上。
参考文献:
[1]王恒科.国外地面战场侦察雷达发展现状与趋势[J].电讯技术,2015,55(7):814-821.
[2]周雷.基于机载GMTI雷达的地面动目标跟踪技术研究[D].北京:中国电子科学研究院,2007:1-2.
[3]李嘉诚,马彦恒,董健,等.小型无人机机载战场侦察雷达关键技术研究[J].飞航导弹,2015(8):37-41.
[4]王保伟.基于战场侦察雷达的信号处理技术研究[D].哈尔滨:哈尔滨工业大学,2014:2.
[5]张卫华,赵宁,鲁加国,等.机载远程战场侦察雷达波控分系统的设计[J].现代电子,1999(3):1-4.
