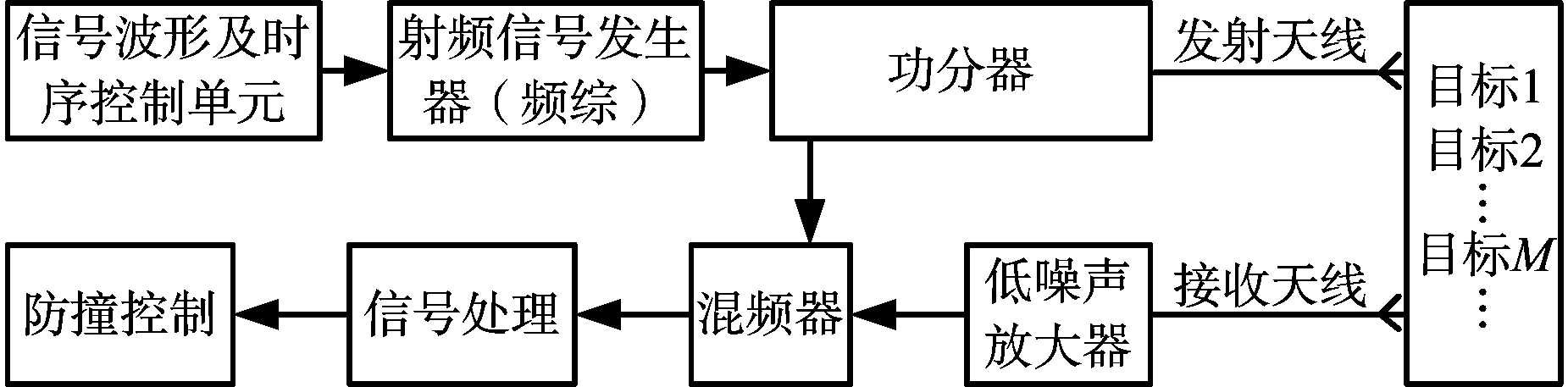
图1 LFMCW雷达系统原理框图
施 佺 1,2 , 王 厅 1 , 许致火 2 , 施佳佳 2 , 孙 玲 1
(1.南通大学电子信息学院, 江苏南通 226019; 2.南通大学交通学院, 江苏南通 226019)
摘 要 : 为适应车辆防撞及辅助智能驾驶应用需求,针对线性调频连续波雷达因固有距离-速度模糊,在检测多个动目标过程中常出现大量虚假目标,从而造成目标误检率高的问题,提出了一种应用频谱局部相似度的多目标频谱配准方法。在深入研究多个动目标上下扫频段内回波基带信号频谱特征的基础上,该方法通过计算目标上扫频段和下扫频段频谱的相关系数,确定了目标的频谱局部相似度,再依据相似程度进行目标频谱配准,从而去除虚假目标。Matlab环境下的大量仿真实验结果表明:与典型的调频连续波匹配方法相比,该方法有效降低了多个动目标情况下的雷达误检率;在一定速度范围内,误检率为0。
关键词 : LFMCW雷达; 局部相似度; 相关系数; 多动目标检测
近年来,随着智能交通在全球的兴起,无人驾驶汽车开始成为人们研究的热点。作为无人驾驶汽车所必需的高级驾驶辅助系统(ADAS)的关键技术,车载雷达技术迅速发展,并受到各大汽车公司的广泛关注 [1] 。线性调频连续波(Linear Frequency Modulated Continuous Wave, LFMCW)雷达因具有结构简单、分辨率高、发射功率低等优点,被认为是适用于无人驾驶汽车的主要车载雷达之一 [2] 。然而,LFMCW雷达在多目标情况下要实现目标上下扫频段差拍信号频谱的准确配对仍然是一个难点。
为解决LFMCW雷达的距离-速度耦合问题,实现多个动目标频谱的准确配对,学者们提出了很多方法。目前常用的方法有MTD-速度配对法 [3] 、多次筛选法 [4-5] 和设计新的波形 [6-10] 等。其中,MTD-速度配对法消除了固定回波对目标配对的影响,简化了目标环境,但是该方法仍然难以对具有相似反射强度和频谱形状的不同目标进行正确配对;多次筛选法常采用两次筛选,得到目标差拍信号频谱的所有配对组合,但是其不能很好地剔除虚假目标,增加了目标识别的难度;设计新的波形虽然可以较好解决目标频谱的配准问题,但是其增加了信号处理的复杂度。基于目标在上下扫频段差拍信号频谱的局部相似度,本文提出了一种新的多个动目标配对方法,实现了对一定速度范围内多个动目标的精准检测。
本文首先简要分析介绍LFMCW雷达的基本原理,然后给出频谱配对方法的详细过程,最后是算法的验证及验证结果的分析,
LFMCW雷达系统的原理框图如图1所示。图中,信号波形及时序控制单元产生的连续三角波控制射频信号发生器,射频信号发生器的输出信号经功分器一方面传输到发射天线使其发射微波信号,另一方面传输给接收通道的混频器;发射的目标后向散射回波信号被雷达接收天线接收后,经过混频模块得到目标的基带信号。
图1 LFMCW雷达系统原理框图
图2给出了LFMCW雷达系统中调频连续波发射信号、回波信号的频率与时间关系示例。其中,图2(a)为发射信号与回波信号的时频关系,图中 B 为扫频带宽, T 为上下扫频间隔, t d 为回波信号与发射信号之间的延迟, f d 表示运动目标回波信号产生的多普勒频移;图2(b)为差拍信号的时频关系,图中 f b+ 和 f b- 分别表示上下扫段所得的差频。
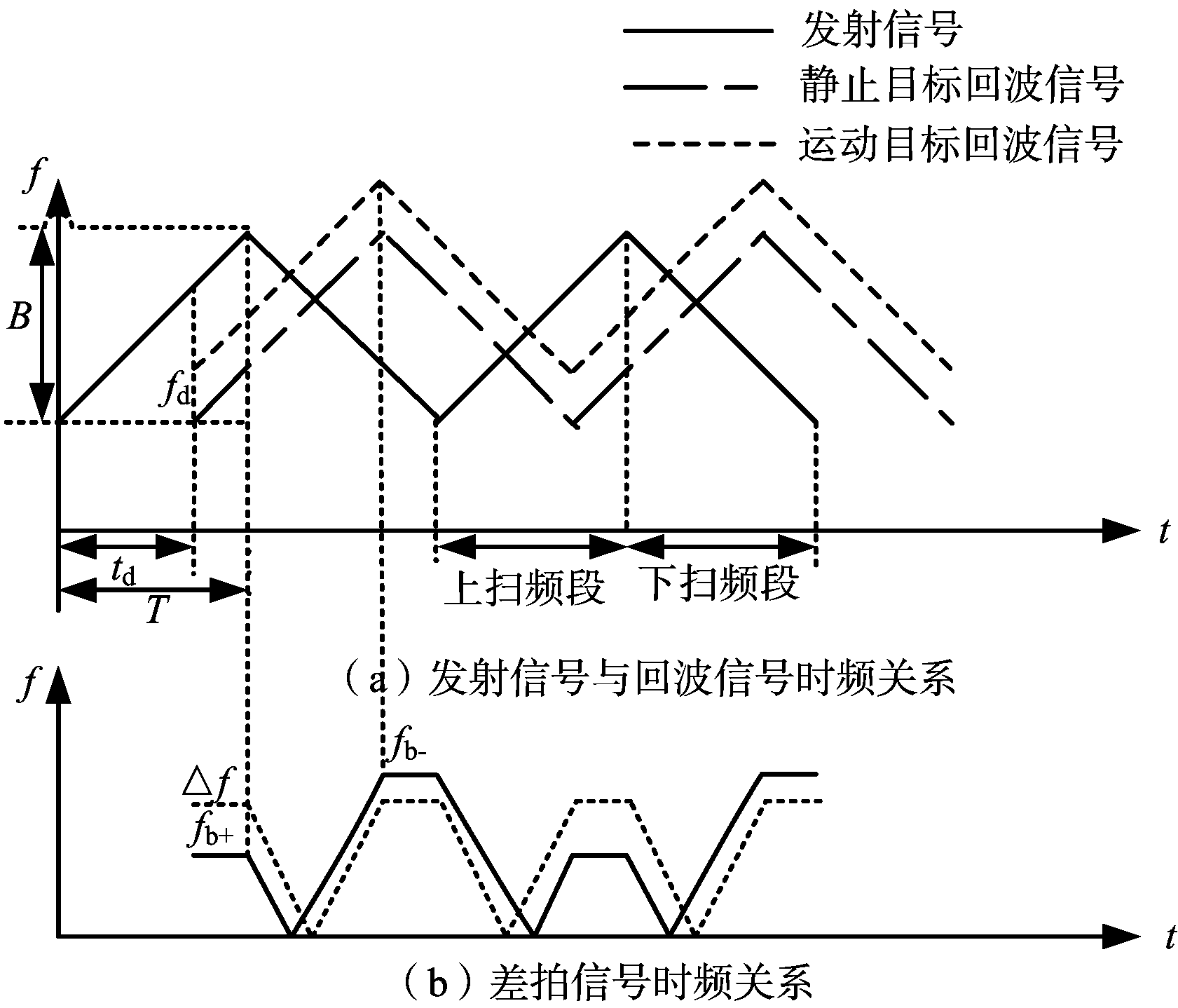
图2 线性调频连续波雷达信号频率与时间关系
由图2可见,当目标处于静止时,回波信号与发射信号的形状保持一致,但两者之间存在一个延迟 t d 。 t d 与雷达距目标的距离 R 的关系为
t d =2 R / c
(1)
式中, c 为光速。
若设发射信号与静止目标回波信号的频率差为Δ f ,根据图2(a)所示的发射信号与静止目标回波信号的时频关系可得
(2)
结合式(1)和式(2),进一步得到静止目标的距离 R 为
(3)
当目标处于运动状态时,运动目标回波信号中将产生多普勒频移 f d ,该频移与发射信号频率 f 0 ,目标与雷达间的相对速度 v 的关系为
(4)
此时,在三角波的上升沿和下降沿得到的差频如图2(b)所示,它们的计算式为
(5)
结合式(3)、式(4)和式(5),最终推导出运动目标的速度 v 和距离 R 分别为
(6)
(7)
为了分析目标上扫频段和下扫频段差拍信号频谱之间的关系,假设 x ( f )为某一目标的上扫频段差拍信号频谱函数, y ( f )为该目标下扫频段差拍信号频谱函数,若用 y ( f )近似表示 x ( f ),即
x ( f )≈ a xy y ( f )
(8)
式中,逼近系数 a xy 为实系数。定义这两个信号的近似误差信号 e ( f )为
e ( f )= x ( f )- a xy y ( f )
(9)
由式(9)可见,适当选择逼近系数 a xy 可使该近似误差信号最小,即为最佳近似。而误差信号的二阶规范量或能量(当功率信号是为平均功率时)常被用来衡量误差信号的大小,因此,根据信号分析中著名的最小误差能量(或均方误差)准则 [11] ,即上述误差信号的能量(或平均功率)最小时可认为获得了最佳近似,计算近似误差信号 e ( f )的均方误差为
![]()
![]() e 2 ( f )d f =
e 2 ( f )d f =
![]() [ x ( f )- a xy y ( f )] 2 d f
[ x ( f )- a xy y ( f )] 2 d f
(10)
为求出 ![]() 最小时的 a xy 值,令式(10)对 a xy 的导数等于0,即
最小时的 a xy 值,令式(10)对 a xy 的导数等于0,即
(11)
由此,求得用 y ( f )表示 x ( f )的最佳逼近系数 a xy 为
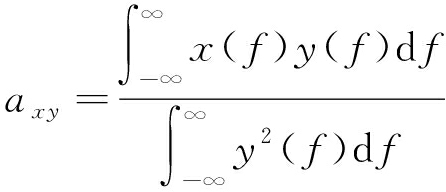
(12)
将此最佳逼近系数代入式(10),可以得到最佳近似下的均方误差为
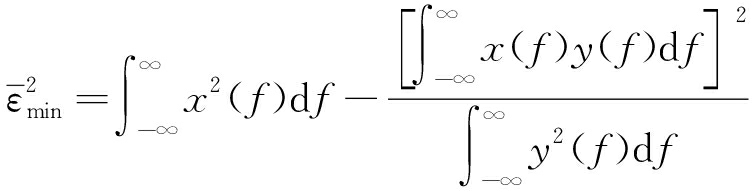
(13)
若把式(13)用原信号能量归一化成相对误差,则有
![]()
![]() x 2 ( f )d f ·
x 2 ( f )d f ·
(14)
若令
(15)
则式(14)改写为
(16)
式中, ρ xy 通常称为 y ( f )与 x ( f )的相关系数,根据积分或求和形式的施瓦兹不等式和2个信号的特性可知,0≤ ρ xy ≤1。若两个信号的相关系数 ρ xy =1,均方误差为0,表示这两个波形相同,为同一目标产生的谱线;若相关系数 ρ xy =0,则无法用一个信号来近似表示另一个信号,即两者不为同一目标产生的谱线;若0< ρ xy <1时,则表示这两个信号之间有一定的相似度,可以用一个信号近似地表示另一个信号,此时, ρ xy 愈接近于1,表示近似的误差愈小,两个信号愈加相似,愈加可能为同一目标产生的谱线。
理论上,同一目标的上扫频段和下扫频段产生的差拍信号频谱具有相同的幅度和频率。虽然在实际应用环境中,由于目标运动起伏、天线损耗等多方面的影响,可能出现两个频谱的幅度不完全相同的情况,但同一目标产生的差拍信号频谱在上下扫频段总是有最大的相似性,从而可以在上下扫频段分别得到的差频信号频谱中找到同一目标产生的谱线。因此,通过计算差拍信号频谱的相关系数,可以实现上下扫频段目标的配准。
图3给出了计算多目标相似度的算法流程。首先,确定目标环境,若目标个数 M =1,则为单目标环境,直接利用式(6)和式(7)求出目标的速度和距离,结束配对;若目标个数 M >1,则计算上扫频段和每个下扫频段差拍信号频谱的相关系数,如目标第 i 个上扫频段和每个下扫频段的相关系数为 ρ i 1 … ρ iM ,找到最大的一个相关系数 ρ ij ,视其为同一目标并进行配对,以此类推,直到完成对每个目标的配准;最后利用式(6)和式(7)求出目标的速度和距离。
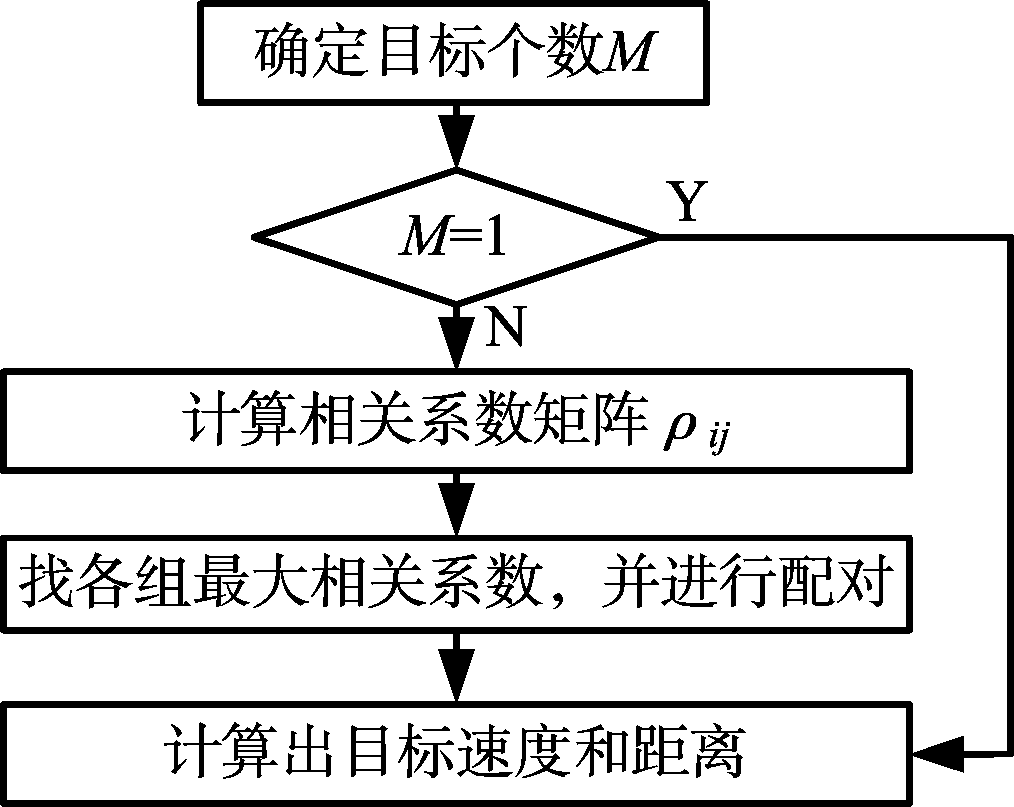
图3 多目标相似度算法流程
本文主要研究中短程雷达对多个动目标的检测,其探测距离小于60 m。具体的雷达信号仿真参数为:中心频率 f 0 =77 GHz;调频带宽 B =600 MHz;为了取2幂级数的采样点数,方便后续的FFT运算,上下扫频间隔 T 为1.024 ms;调频斜率 K = B / T =5.859 4×10 11 ,距离分辨率d R =0.250 0 m,速度分辨率d v =1.902 km/h。
假设目标数 M =4,其中,在距离为25 m(100 d R )处有两个运动目标,速度分别为19.02 km/h(10 d v )和114.14 km/h(60 d v );在距离为32.5 m(130 d R )处也有两个运动目标,速度同样为19.02 km/h(10 d v )和114.14 km/h(60 d v )。图4给出了雷达信号经目标反射后,上扫频段和下扫频段差拍信号的频谱,由图可见,上、下扫频段各有4个峰值,即4个目标在上、下扫频段差拍信号的频谱。图4中,上扫频段曲线上按照峰值的频率由小到大分别称为 A , B , C , D ,下扫频段曲线上同样按照峰值的频率由小到大排列,分别称为 a , b , c , d 。
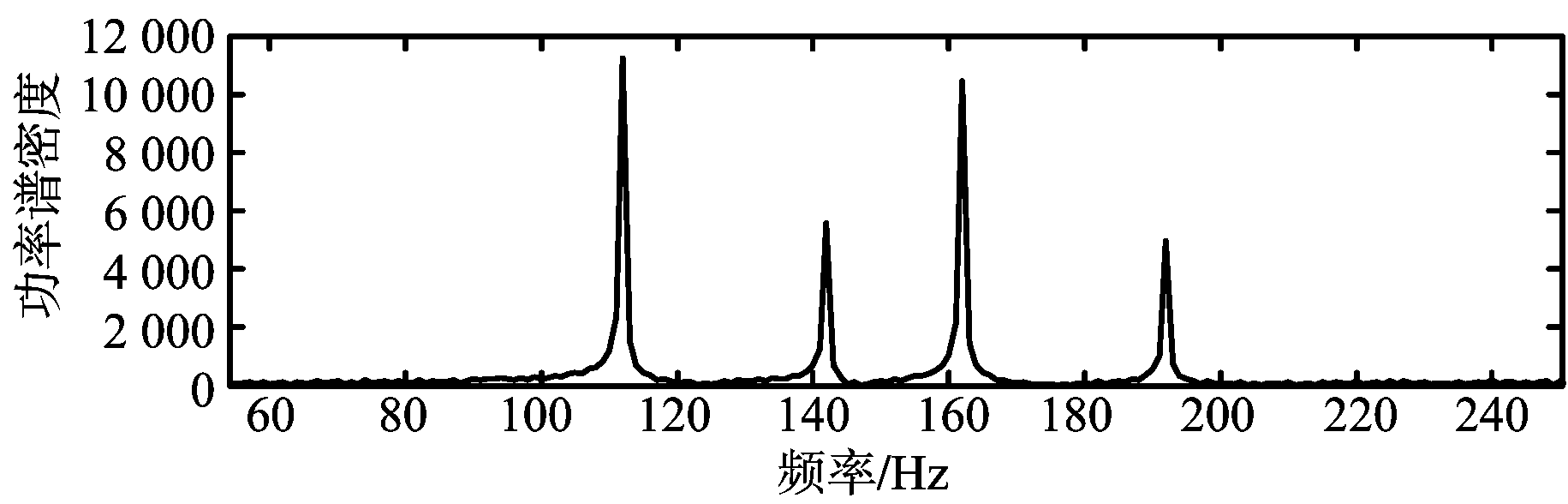
(a) 上扫频段目标频谱
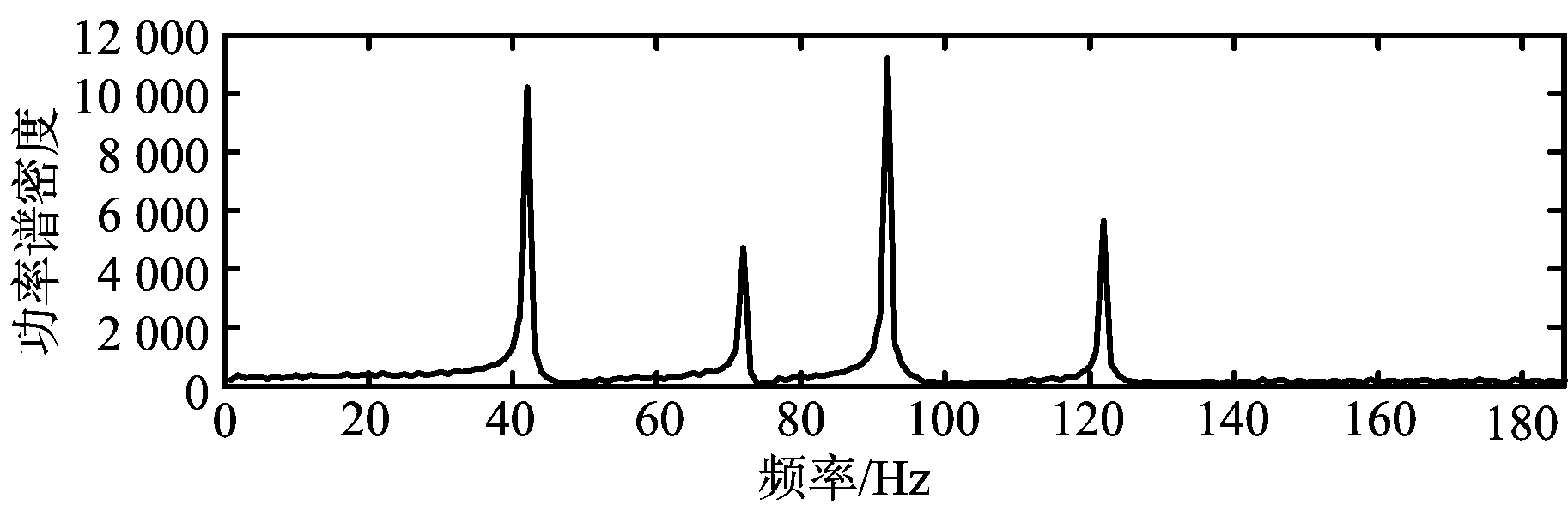
(b) 下扫频段目标频谱
图4 目标上、下扫频段差拍信号的频谱
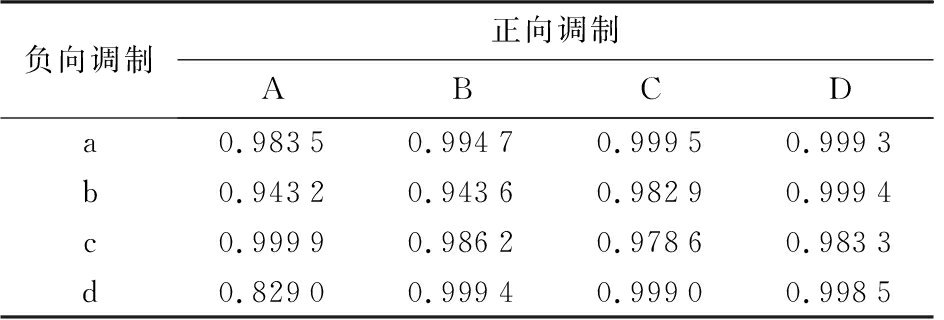
根据图3所示的相似度算法流程,计算得到上、下扫频段差拍信号频谱的各相关系数如表1所示。接着按照相关系数最大的原则进行配对,配对结果为: A 和 c 配对; B 和 d 配对; C 和 a 配对; D 和 b 配对。
表1 差拍信号频谱的相关系数
选取其中的一组进行比较,图5给出了上扫频段信号 A 分别与下扫频段信号 a , b , c , d 的对比分析图。可见,差拍信号 A 和目标下扫频段的差拍信号 c 的频谱波形相似度。可以发现峰值 A 和峰值 c 的波形相似程度最大,并且从表1的数据可知,两者的相关系数也最大,即两者为同一目标的频谱,和上文配对结果相吻合。表2详细列出了目标距离、速度的设定值及其计算值与误差。
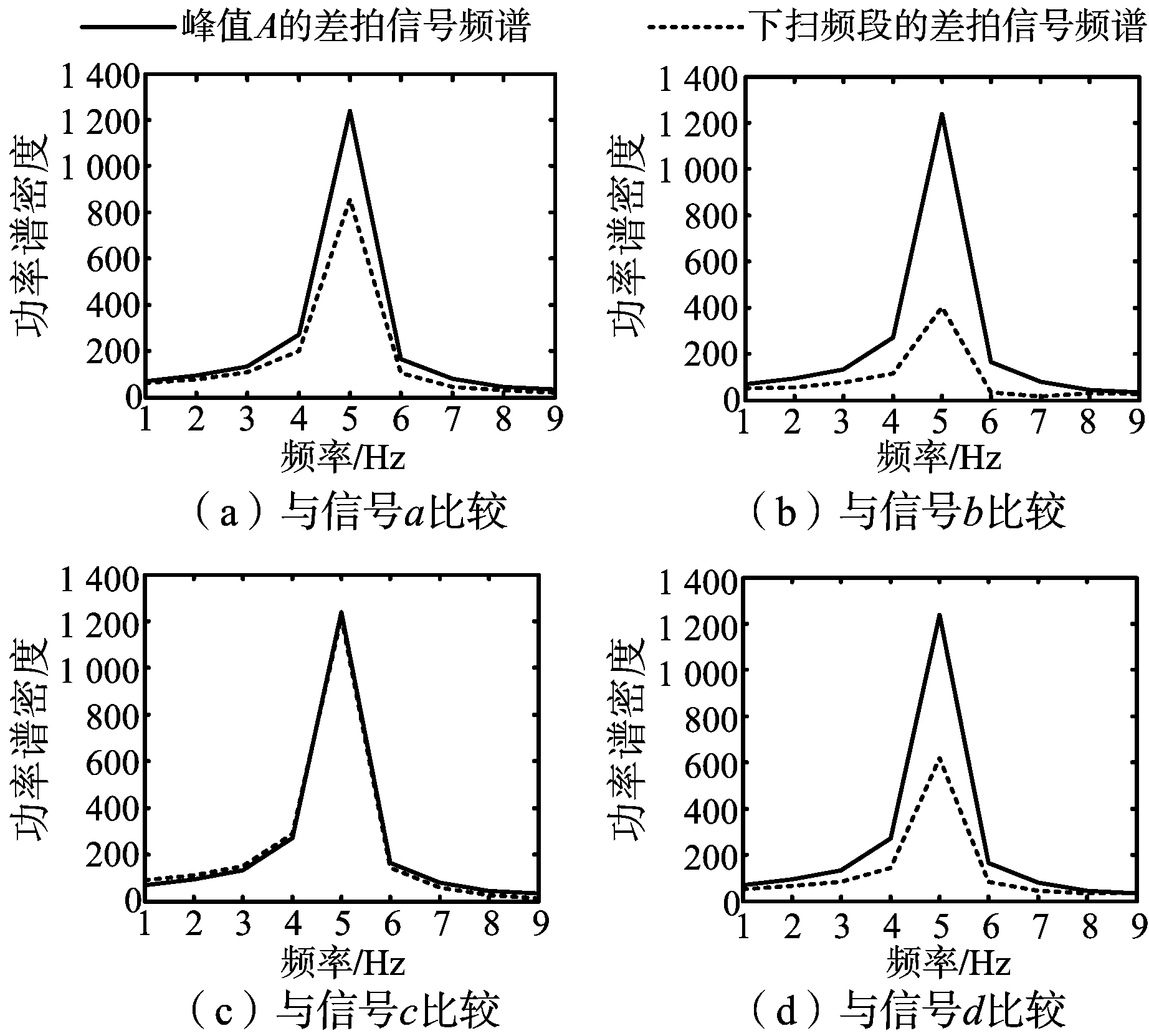
图5 峰值A和目标下扫频段的差拍信号频谱
表2 目标距离和速度设定值与计算值对比
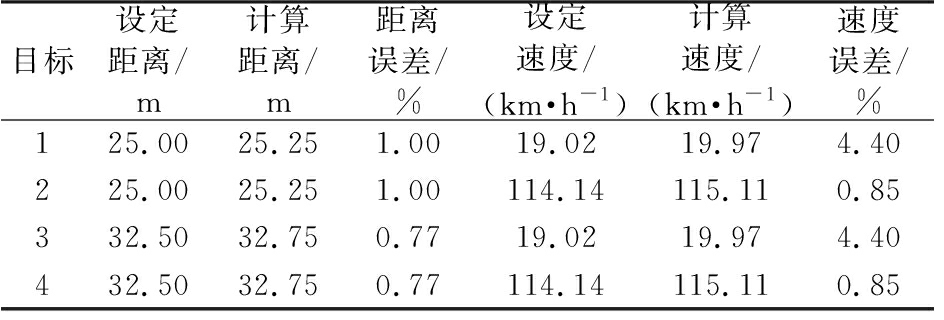
图6给出了典型的调频连续波匹配方法(菱形标记)和本文算法(五角星标记)对多个动目标检测的结果。可见,使用典型的调频连续波匹配算法检测到的目标数量为28个,其中24个为虚假目标,误检率高达87%;而本文算法则排除了所有虚假目标,误检率为0。

图6 多目标检测仿真结果
应用频谱相似度,提出了一种新的线性调频连续波(LFMCW)雷达目标配准方法,有效剔除了检测中的虚假目标,避免了其固有的距离-速度耦合带来的在多运动目标情况下的检测困难。然而,该方法仅适用于中短程距离,并在一定的速度范围内有效。下一步工作是进一步拓展本文方法可使用的距离和速度,还将进行外场实验,通过对真实目标的实时在线检测与分析,在实际应用检验所提方法的有效性。
参考文献 :
[1] PATOLE S M, TORLAK M, WANG D, et al. Automotive Radars: A Review of Signal Processing Techniques[J]. IEEE Signal Processing Magazine, 2017, 34(2):22-26.
[2] 潘世伟,葛俊详,金良. 基于FPGA的LFMCW雷达信号处理算法及实现[J]. 雷达科学与技术, 2017, 15(4):392-395.
PAN Shiwei, GE Junxiang, JIN Liang. A New LFMCW Radar Signal Processing Algorithm Based on FPGA and Its Implementation[J]. Radar Science and Technology, 2017, 15(4):392-395. (in Chinese)
[3] 肖汉,杨建宇,熊金涛. LFMCW雷达多目标MTD-速度配对法[J]. 电波科学学报, 2005, 20(6):712-715.
[4] HYUN E, JIN Y S, LEE J H. Moving and Stationary Target Detection Scheme Using Coherent Integration and Subtraction for Automotive FMCW Radar Systems[C]∥ IEEE Radar Conference, Seattle, WA: IEEE, 2017:476-478.
[5] HYUN E, LEE J H. A Method for Multi-Target Range and Velocity Detection in Automotive FMCW Radar[C]∥ 12th International IEEE Conference on Intelligent Transportation Systems, St Louis, MO: IEEE, 2009:1-5.
[6] 王元恺,肖泽龙,徐建中,等. 一种改进的FMCW雷达线性调频序列波形[J]. 电子学报, 2017, 45(6):1288-1293.
[7] FAN Yuanzhang, XIANG Kai, AN Jianping, et al. A New Method of Multi-Target Detection for FMCW Automotive Radar[C]∥ IET International Radar Conference, Xi’an: IET, 2013:1-4.
[8] 邢自然,朱冬晨,金星. 一种多目标FMCW雷达的高效距离速度测量方法[J]. 电子学报, 2016, 44(9):2148-2157.
[9] ZHOU Huiyang, CAO Pengfei, CHEN Shujing. A Novel Waveform Design for Multi-Target Detection in Automative FMCW Radar[C]∥ IEEE Radar Conference, Philadelphia, PA: IEEE, 2016:1-5.
[10] HYUN E, JIN Y S, LEE J H. Design and Development of Automotive Blind Spot Detection Radar System Based on ROI Preprocessing[J]. International Journal of Automotive Technology, 2017, 18(1):165-177.
[11] 徐守时. 信号与系统: 理论、方法和应用[M]. 合肥: 中国科学技术大学出版社, 1999:31-33.
SHI Quan 1,2 , WANG Ting 1 , XU Zhihuo 2 , SHI Jiajia 2 , SUN Ling 1
(1. School of Electronics and Information , Nantong University , Nantong 226019, China ;2. School of Transportation , Nantong University , Nantong 226019, China )
Abstract : A large number of false targets are often found in the process of detecting multi-moving targets due to the inherent distance-speed blur of LFMCW radar, which often leads to the high false detection rate. In order to meet the requirements of vehicle collision and auxiliary intelligent driving, a multi-moving targets spectrum registration method based on the similarity of local spectrum is presented. After detailed analysis of the spectral characteristics of the echo baseband signal in the upper and lower sweep bands of multiple moving targets, the local similarity of the spectrum is determined by calculating the correlation coefficient of the target’s upper and the under sweep frequency spectrums. Then, the false target is removed according to the similarity of target spectrum distribution. The results of a large number of simulation experiments in Matlab show that the proposed method can effectively reduce the radar false detection rate in the case of multi-moving targets and the error rate is zero in a certain speed range compared with the typical FMCW matching method.
Key words : LFMCW radar; local similarity; correlation coefficient; multi-moving target detection
基金项目: 国家自然科学基金(No.61771265); 江苏省“333工程”(No.BRA2017475); 江苏省高校自然科学基金(No.17KJB5100547); 南通市先进通信研究院资助项目(No.KFKT2016A11); 江苏省“青蓝工程”资助项目
修回日期: 2017-12-06
DOI: 10.3969/j.issn.1672-2337.2018.04.010
收稿日期: 2017-10-25;
文献标志码: A
文章编号: 1672-2337(2018)04-0411-05
作者简介 :
中图分类号 : TN958.94

施 佺 男,1973年生,江苏海门人,博士,教授、硕士生导师,主要研究方向为智能信息处理。
E-mail:sq@ntu.edu.cn
王 厅 男,1992年生,江苏宿迁人,硕士研究生,主要研究方向为雷达信号处理。
许致火 男,1983年生,福建长汀人,博士,主要研究方向为先进雷达系统及信号处理方法。
E-mail:xuzhihuo@ntu.edu.cn
施佳佳 男,1984年生,江苏海门人,博士,主要研究方向为智能信息处理。
孙 玲 女,1976年生,江苏如皋人,博士,教授、硕士生导师,主要研究方向为射频电路设计、智能信息处理。